簡易的な二足歩行ロボットを作る~その2~

ロボット作成開始!
それでは実際にロボットを作っていきます。まずはCADを使ってロボットのパーツを設計していきます。CADとはComputer-Aided Designの略でコンピュータ支援設計と呼ばれています。要するにコンピュータを使って行う設計のことです。
一昔前ではCAD用ソフトウェアは非常に高価な印象でしたが、最近では個人でも利用できる価格帯のもの、あるいは無料のものが登場し広く利用されています。3Dプリンタで立体物を印刷をする場合は3DCADと呼ばれるものを使うことになるでしょう。3DCADの有名なものとしてはSolidWorksなどがありますが、私はFusion360を利用しています。
Fusion360でパーツ設計
まずは右脚からです。足首にはSG92R、太股部分にはSG90を入れて固定できるようにします。また、足の底面は自由に装飾できるよう装飾パーツの取り外しができるようにしています(図1)。装飾パーツはフォームで作成しました。メンテナンス性も考えて、後から取り外ししやすいようにも気をつけています。固定にはM2, M3のネジを使用します。
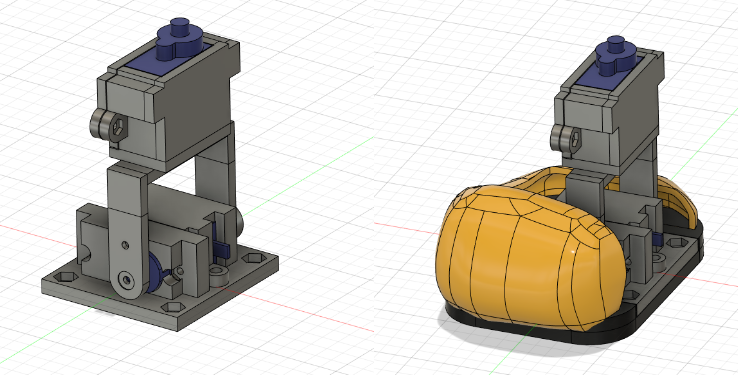
左脚はミラーリング機能で対称なパーツを作ってしまいました。
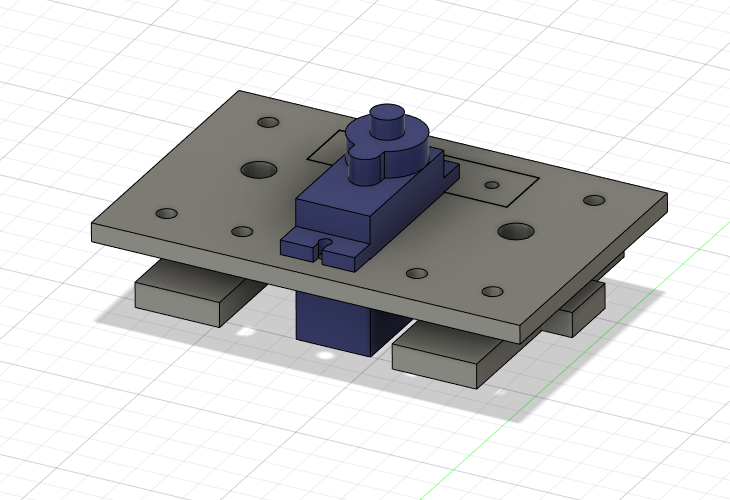
次は胴体部分です。胴体というより腰かな?頭部を回すためのSG90を取り付け、装飾パーツ取付穴をいくつか開けます(図2)。
最後は頭部。まずは底面の部分です(図3)。中央には取外し可能な電池ボックスを配置し、その上にカバーを被せRaspberry Pi Picoを載せます。Raspberry Pi PicoにはKitronikのサーボモータドライバ基盤を装着する想定です。電池は14500リチウムイオン電池2本を搭載します。固定部分はネジを使うと面倒なので回転して締めるツイストロック方式にしています。

頭カバーはこんな感じ。目をフォームでデザインし、かわいらしいデザインにしました。

全体像はこんな感じです(図5)!
さあ、プロトタイプの設計はできました。はたしてうまく動くでしょうか?次回は3Dプリンタでのパーツ印刷からスタートです。
