Making a Simple Bipedal Robot Part 1
Let’s make a bipedal robot!
Now I am going to build a robot! This time, I will make a simple biped robot.
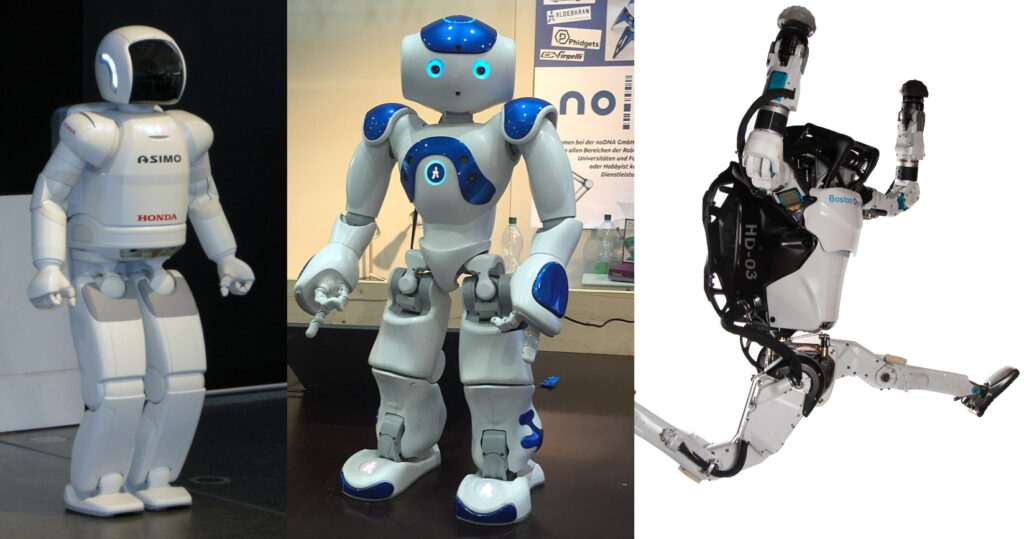
When you think of a typical bipedal robot, you probably think of one that has the same structure as a human.
Examples include Honda’s Asimo and the former Aldebaran’s Nao.
In recent years, Boston Dynamics’ Atlas and Xiaomi have also introduced bipedal robots.
https://upload.wikimedia.org/wikipedia/commons/0/0e/2005_Honda_ASIMO_01.JPG
https://upload.wikimedia.org/wikipedia/commons/4/47/Nao_Robot_%28Robocup_2016%29.jpg
https://www.bostondynamics.com/sites/default/files/2021-08/atlas-dynamic.jpg
These are called humanoid robots and have approximately the same joint structures as humans. In reality, however, they often have more limited joints than humans. The index of “how much the joints can move” is called “degree of freedom.” It is also denoted as DoF.
These humanoid robots are quite complex and very difficult to make and control. Therefore, this time, I will make a simpler bipedal robot.
I will also try to make a “cute” robot, which is the goal of Toon Robotics.
Bipedal robots and degrees of freedom
For example, according to this article, Atlas described above seems to have 28 DoFs. Nao is listed as having 25 DoFs on its official page.
In addition, Guinness World Records lists Kengoro of the University of Tokyo as the humanoid robot with the most joint DoFs, with 174 DoFs.
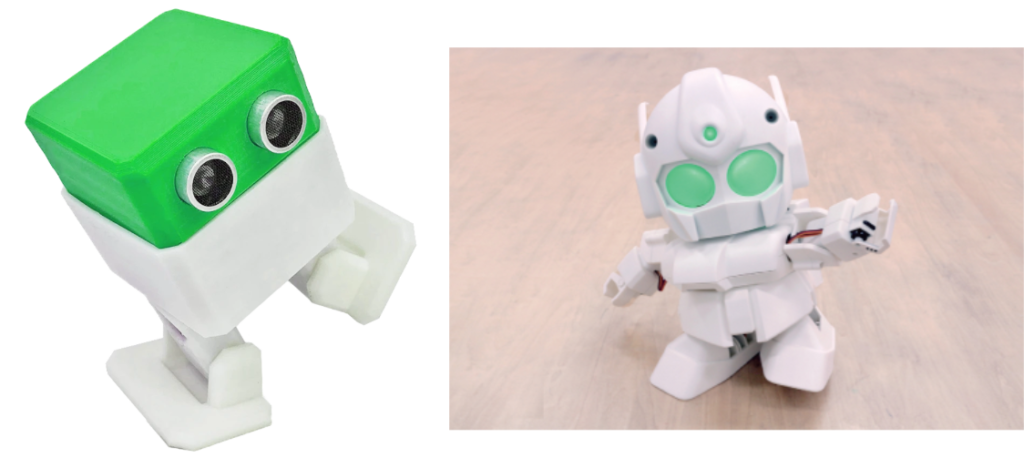
On the other hand, there are biped robots with significantly reduced DoFs: Otto DIY has 4 DoFs and Rapiro has 12 DoFs.
So, this time, I would like to make a robot with as few DoFs as possible, but with a body structure that can express various movements in its way.
Configuration of the bipedal robot to be built in this project
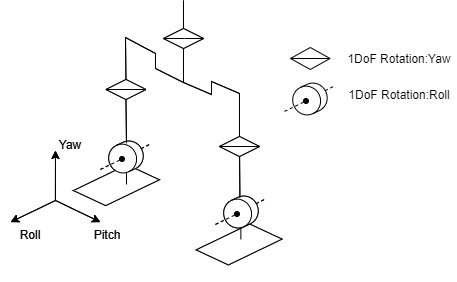
First, determine the basic structure of the robot to be built this time.
The legs have 4-DoF joints and can rotate in the roll and yaw directions as shown in Figure 3. This configuration is similar to that of the Otto DIY robot described above. One more servo for the yaw direction is mounted on top of it, and the head part on top of it can rotate. It has a total of 5 degrees of freedom. The head is equipped with a single board computer and battery, and sensors can be mounted later. The appearance of the robot will be customizable, as I want to have fun with different robot designs!
As for the internal components, I assume a Raspberry Pi Pico as a single board computer and a lithium-ion battery for battery. The servo motor is assumed to be SG90, or SG92R if the torque is insufficient. Sensors are to be placed on top of the head.
The approximate composition is like this. Now I would like to start making it next time.
