簡易的な二足歩行ロボットを作る~その1~
二足歩行ロボットを作ろう
それではこれから実際にロボットを作っていこうと思います!今回は簡易的な二足歩行ロボットを作っていきます。
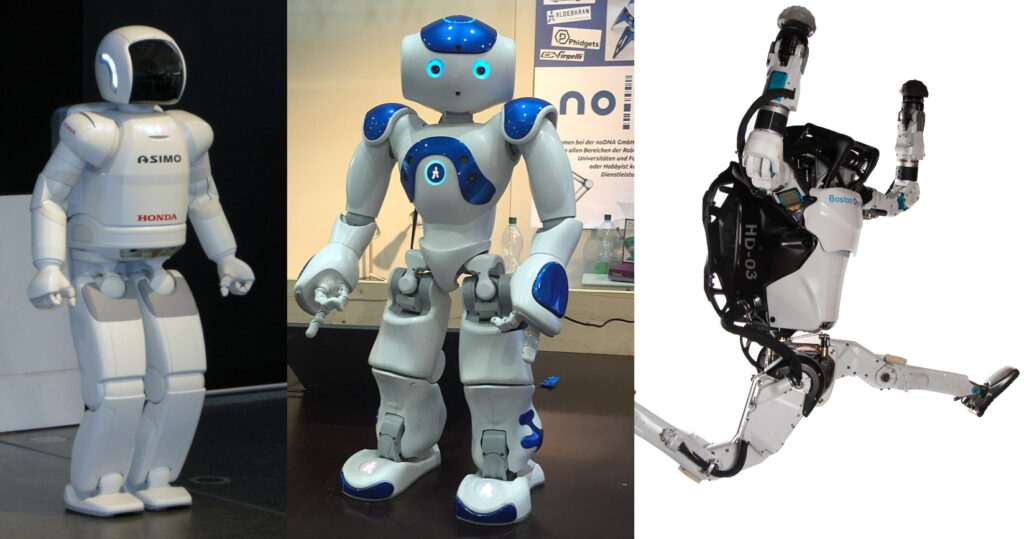
一般的な二足歩行ロボットというと、人間と同じ構造をしているものを思い浮かべるのではないかと思います。
例えばHondaのAsimoや旧アルデバランのNaoなんかがそうですね。
近年ではBoston DynamicsのAtlasやXiaomiも二足歩行ロボットを発表しています。
https://upload.wikimedia.org/wikipedia/commons/0/0e/2005_Honda_ASIMO_01.JPG
{kind=link}
https://upload.wikimedia.org/wikipedia/commons/4/47/Nao_Robot_%28Robocup_2016%29.jpg
{kind=link}
https://www.bostondynamics.com/sites/default/files/2021-08/atlas-dynamic.jpg
{kind=link}
これらはヒューマノイドロボットと呼ばれ、 おおよそ人間と同じ関節構造をしています。ですが実際には人間より制限のある関節になっている場合が多いです。この「関節がどの程度動くか」という指標は「自由度」あるいは「関節自由度」と言われています。英語だとDoF(Degree of Freedom)。
こうした人間に近いヒューマノイドロボットはかなり複雑で作るのも制御もとても大変です。ですので今回はもっともっと簡易化した二足歩行ロボットを作ります。
またToon Roboticsの目指すところである「かわいい」ロボットにしていこうと思います。
二足歩行ロボットと自由度
例えばこの記事によると、先述のAtlasは28自由度のようです。また、Naoは25自由度と公式ページに記されています。またギネス世界記録では最も関節自由度の多いヒューマノイドロボットとして東京大学のKengoroが174自由度のロボットとして紹介されています。
一方で二足歩行ロボットでありながら大幅に自由度を落とした形式のものも存在します。Otto DIYは4自由度、Rapiroは12自由度です。
そこで今回はできるだけ自由度を少なく絞りつつ、それでいてそれなりに色々な動きが表現できそうな身体構成にしていこうと思います。
今回作る二足歩行ロボットの構成
まず今回作るロボットの基本構造をどのようにするか決めます。
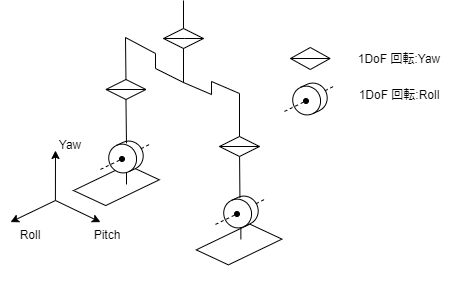
脚部分は4自由度で図3のようにロール(Roll)、ヨー(Yaw)方向に回転できる関節を片足ずつ持つようにします。このあたりの構成は先述のOtto DIYなどと同様です。その上に更に1つヨー方向のサーボを搭載し、その上の頭部分を回転できるようにします。トータル5自由度ですね。頭部分にはシングルボードコンピュータ、バッテリーを搭載し、センサなども後から搭載できるようにします。いろんなデザインのロボットを用意して楽しみたいので見た目も後から多少カスタマイズできるようにします!
内部の構成要素としてはとりあえずシングルボードコンピュータとしてRaspberry Pi Pico、バッテリーはリチウムイオンバッテリーを想定。サーボモータはSG90、トルク不足の場合はSG92Rを想定します。センサ類は頭の上に載っけるように。
おおよその構成はこんな感じ。それでは次回から実際に作っていきたいと思います。
