メカナムホイールを作る! 3Dプリンタで印刷&簡単組み立て
概要
3Dプリンタで印刷&簡単組み立てで自作できるメカナムホイールを作りました!このメカナムホイールはほぼ全てのパーツを3Dプリンタで作成します。様々な形状に対応できるアダプタを利用することで、多種多様なアクチュエータに対応できます。

こちらのサイトで販売しています。すぐに印刷できるSTLファイルに加え、設計ファイルを編集してオリジナルのパーツも作れるようにSTEPファイルも用意しています。
本記事では組み立て方法について解説いたします。
ダイジェスト動画
作り方のダイジェスト動画です。合わせてご覧ください。
メカナムホイールを作ろう
メカナムホイールとは全方向移動型の車輪で、ステアリング機構を持たなくても車輪の回転だけで任意の方向に移動できるものです。ホイールを囲むようにローラーが45°の角度で取り付けられている特徴的な形をしています。
こうしたメカナムホイールはいくつか販売されてはいるものの、高価であったり、入手経路が限られたり、自身の利用するアクチュエータに合わせたちょうどよい形状がなかったりといろいろな制約があります。
また3Dプリンタで作成できるモデルを公開している方もいますが、作成難易度が高かったり、細かなパーツが必要であったりとこちらもまた制約があります。
そこでいつでも(1)簡単に3Dプリンタで印刷できて(2)簡単に組み立てられ(3)様々なアクチュエータに簡単に接続できるメカナムホイールを作りました!
用意するもの
必要なものを以下に列挙します。
- Easy to Print and Assemble Mecanum WheelのSTLファイルを印刷したもの
- ネジ M2 25mm以上 3本
- ナット M2 6個
ネジ、ナットはホームセンターなどで購入してください。
この他にホイールの接続先のロボットカーなどが必要となります。メカナムホイールの使い方やロボットカーについてはこちらの資料が参考になります。その他解説編でも実験用ロボットカーがでてきます。
Easy to Print and Assemble Mecanum Wheelに含まれているSTLファイルは以下になります。
- wheel_top_R.stl
- wheel_top_L.stl
- wheel_bottom_R.stl
- wheel_bottom_L.stl
- sub_roller.stl
- universal_adapter.stl(必要な場合のみ)
- universal_shaftless_adapter.stl(必要な場合のみ)
- LX-224_adapter.stl(必要な場合のみ)
- LX-1501_adapter.stl(必要な場合のみ)
- sub_roller_for_TPU.stl(オプション)
- sub_roller_pillar_for_TPU.stl(オプション)
ホイールの基本部分はwheel_topとwheel_bottomから構築します。メカナムホイールは4つセットで利用しますが、このうち2つはwheel_top_R.stlとwheel_bottom_R.stl、もう2つはwheel_top_L.stlとwheel_bottom_L.stlを用いて組み立てます。
ローラー部分はsub_roller.stlを利用しますが、床面によっては更にグリップが必要となるためその際の加工方法については後述します。同様にグリップを得る手段としてTPU素材を利用することが可能です。その際は代わりにsub_roller_for_TPU.stlとsub_roller_pillar_for_TPU.stlを用いてローラーを作成します。
車軸への取り付け部分には(種類名)_adapter.stlという名前のもののいずれかを利用します(以降アダプターと呼びます)。このセットには自分で取り付け箇所に穴を開けて使えるuniversal_adapter.stl, universal_shaftless_adapter.stlを用意しています。他にもHiWonder社製のサーボモータLX-224, LX-1501で使えるLX-224_adapter.stl、LX-1501_adapter.stlも用意しています。合わせてご自身で任意のアダプターを作成できるよう、設計データをSTEPファイルとして同梱しています。そのため、ご自身の環境に合わせたアダプターを自作することも可能です。
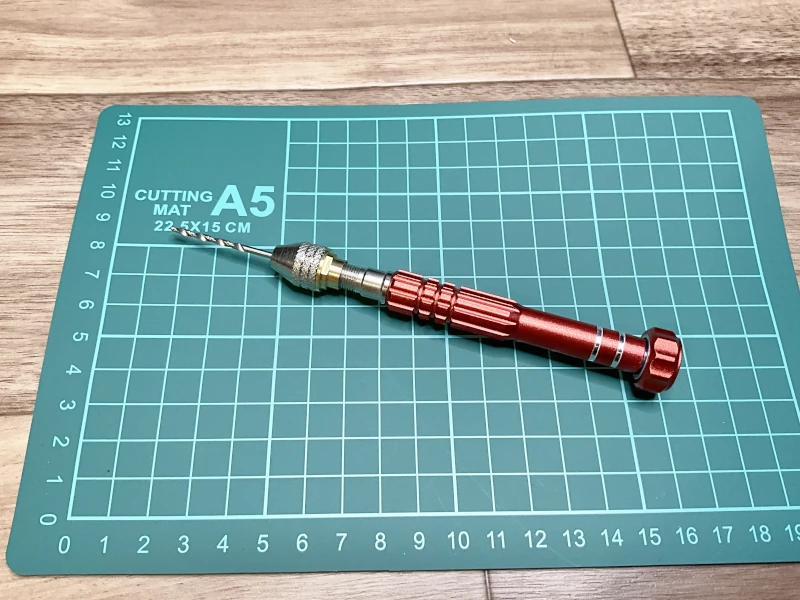
また、組み立ての際にはこういった工具を使うとより便利です。

作り方
まずはパーツを全て印刷します。図1が印刷したものです。

これらは全てBambu lab X1 Carbonを使いPLAで印刷しました。sub_roller_for_TPUのみTPUで印刷しています(こちらは必要な場合のみ印刷してください、必須ではありません)。もちろん他のプリンタや素材でも可能です。
ホイールの準備
まずはホイール部分を準備します。wheel_bottom_R, wheel_top_Rの組み合わせか、wheel_bottom_L, wheel_top_Lの組み合わせで作ります。各2セットずつ作ります。(図2)

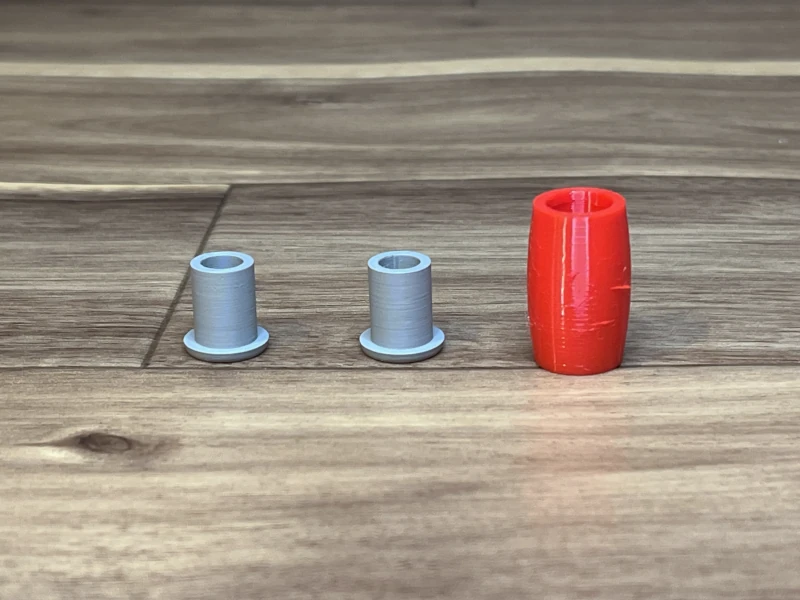
ローラーの準備
次にローラー部分を用意します。メカナムホイール1つに対して8個必要です。十分な摩擦があり、グリップできる床面に対してはPLAなどでそのままsub_rollerを印刷すればよいですが、滑りやすい床面などさらなるグリップ力が必要な場合は摩擦力を稼ぐ加工をするか、TPU用のローラーパーツを使ってTPUローラーを作成します。方法については「ローラーのグリップが足りないときは」で解説します。(図3)
なお以降は「ローラーのグリップが足りないときは」で解説する、熱収縮チューブによるグリップ加工済みのローラー(図3中央)を用いて説明していきます。ですが、組み立て方はPLAローラー、TPUローラーであっても同様です。

ホイールの組み立て
図4のように、ホイールのパーツの片側にローラーをはめ込んでいきます。

8つのローラーをはめ込んだら、もう片方のホイールパーツを組み合わせます(図5)。その際、ホイール外側の矢印が同じ位置に来るように合わせます(図6)。

しっかりとはまったら、ネジ留めを行います。図7、8のようにwheel_top側にM2ナットを入れ、wheel_bottom側から25mm以上のM2ネジ3本を使って固定します。

3本ともネジ留めが終わったら、図9のようになるはずです。
ローラーを回転させてみて回りにくいようであれば、軽くヤスリ掛けして調整しましょう。
アダプターの準備
次にホイールと車軸をつなぐアダプターを作ります。
今回はuniversal_adapter.stl、universal_shaftless_adapter.stl、LX-224_adapter.stl、LX-1501_adapter.stlを用意しています。LX-224_adapter.stlとLX-1501_adapter.stlはそれぞれHiWonder社製のサーボモータLX-224とLX-1501をモーターモード(無限回転サーボ)で利用することを想定し、付属のサーボホーンを簡単に取り付けられるようにしています。
またuniversal_adapter.stl、universal_shaftless_adapter.stlはご自身で利用する無限回転サーボやモータに合わせて穴を開けるなど加工して接続できるように作成しています。
更にご自身でCADソフトなどにより編集ができる方は、同梱のSTEPファイルを利用することでオリジナルのアダプターを作成することも可能です。
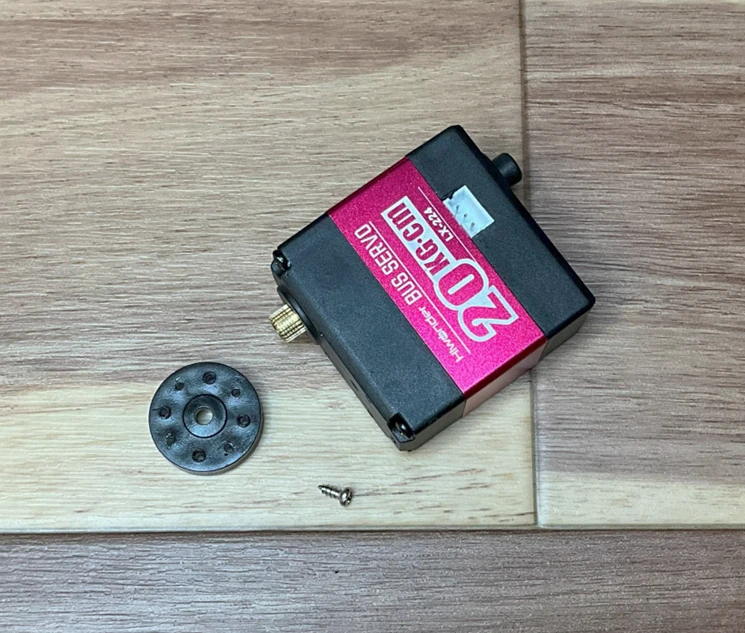
まずはHiwonder社のLX-1501(図10)を利用する場合の手順について説明します。LX-1501での説明ですが、その他のサーボを用いたものやuniversal_adapter, universal_shaftless_adapterを用いる場合でも基本的な流れは同様です。

またHiwonder社製のサーボモータをモータモードで利用する方法はこちらです。
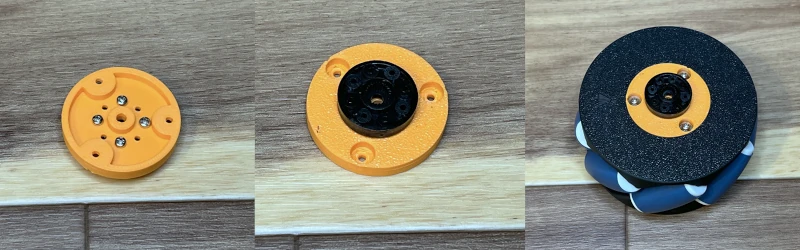
LX-1501_adapterは図11のようになっています。
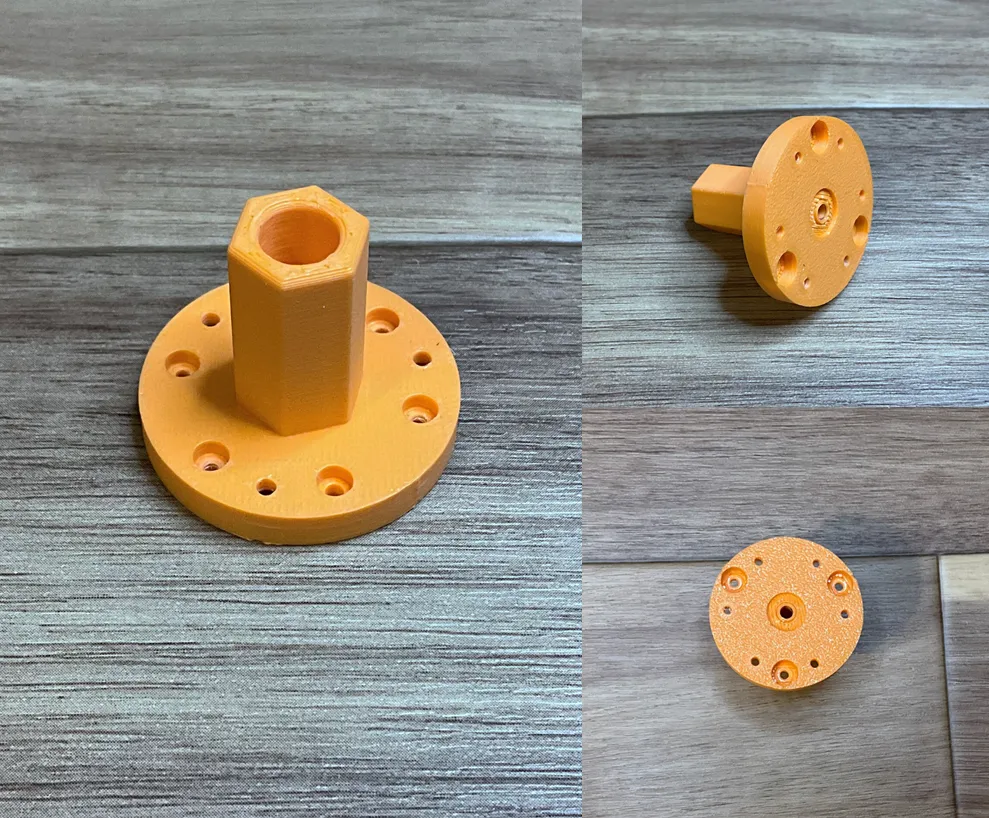
これに、サーボホーンを取り付けます。アダプターにネジを通し、サーボホーンを固定します(図12)。今回は8mmのM2ネジを使っています。図13のようにしっかり固定できたら準備完了です。


サーボホーンの穴にネジが入っていかない場合は、ピンバイスを使って穴を少し広げると良いです(図14、15)。

アダプターの取り付け
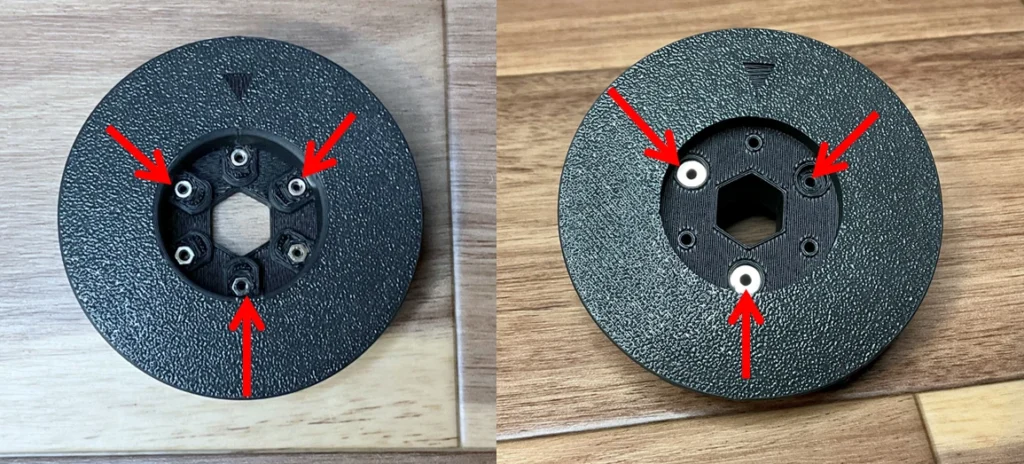
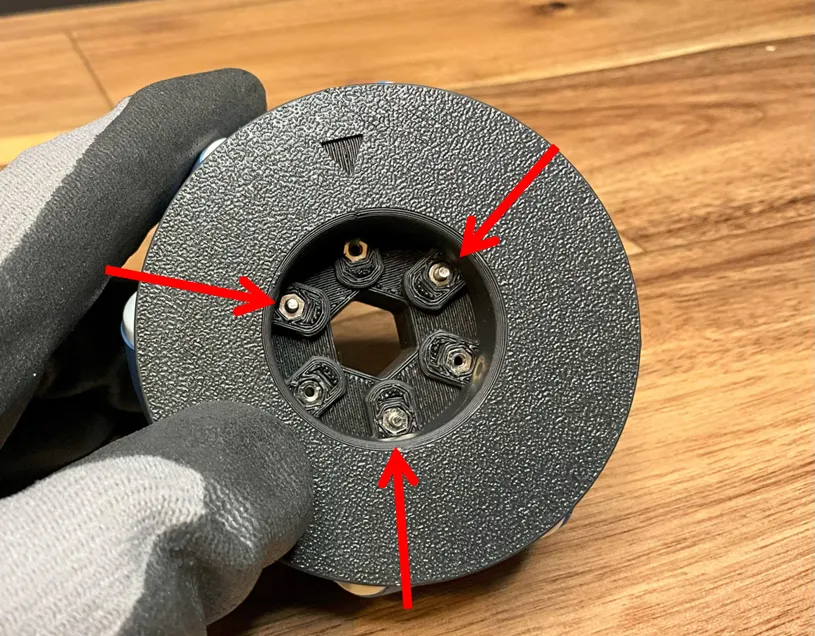
アダプターが用意できたら、図16の矢印の位置の穴に25mmのM2ネジを通して、更にホイールのwheel_bottom側の残りの穴に通します。そしてwheel_top側のナットに通してネジ留めすることでアダプターをホイールに固定します(図17)。

その他のアダプターの例
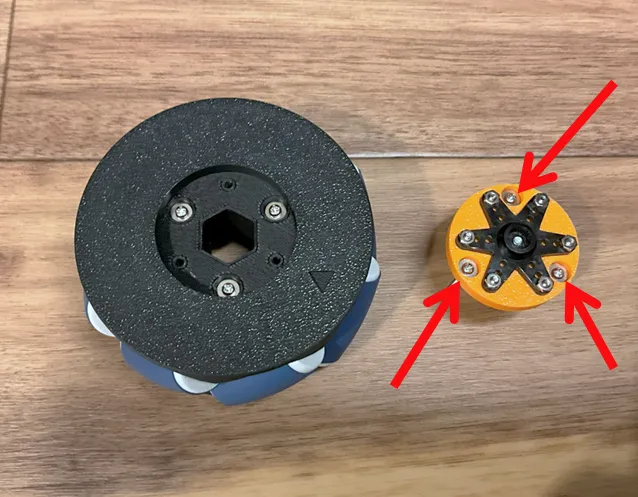
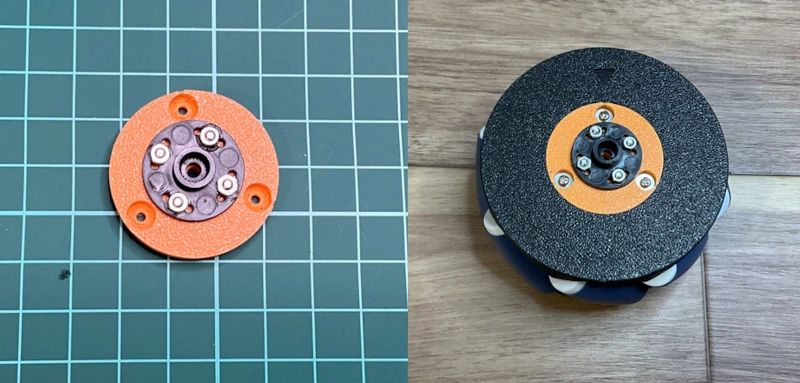
他にもHiWonder社製のLX-224(図18)用アダプタLX-224_adapterを用意しています。
組み立て方は同様です(図19,20)。サーボホーンのアダプタへの固定へは付属のネジを使っています。

またサイズが異なるサーボホーンや車軸固定ハブを取り付ける場合は、universal_adapter、またはuniversal_shaftless_adapterにご自身で穴を開けて利用することができます(図21)。この場合もuniversal_adapter, universal_shaftless_adapterにピンバイスなどを使って穴を開ける以外は組み立て方は同様です(図22,23)。


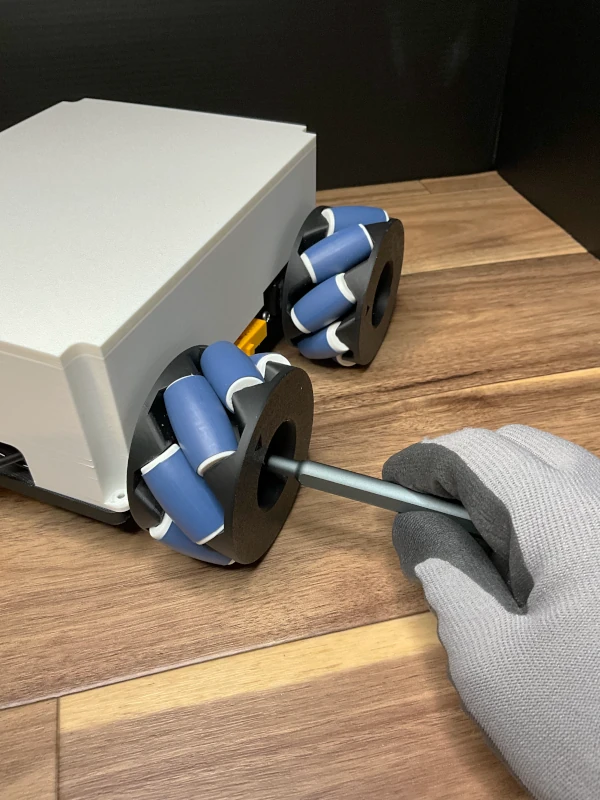
車軸への取り付け
ここまでできたら、サーボモータなどの車軸となる部分にサーボホーン部分を取り付けます(図24)。サーボモータの場合は更に回転軸の中心部分にネジ留めします。LX-1501の場合はM3ネジで固定しました(図25)。利用するアクチュエータに合わせて固定してください。

ローラーのグリップが足りないときは
PLA材などで作成したローラーの場合、床面によっては滑ってしまい、上手く動作しない場合があります。そのような場合は(1)ローラーを加工するか(2)別の素材で印刷することで改善できます。まずは熱収縮チューブを使った加工から見ていきましょう。
熱収縮チューブを使った加工
熱収縮チューブとは電気回路の配線や機器を保護するチューブ状の素材で、加熱することで縮み、対象物に密着するものです。
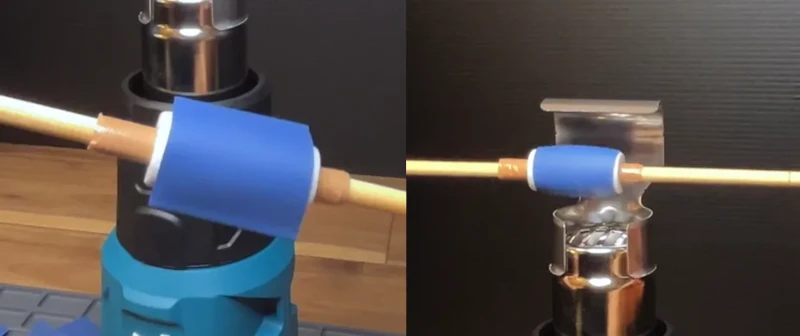
sub_rollerには直径18mmの熱収縮チューブを使います(図26)。このチューブを加熱することで収縮させることができますが、加熱にはヒートガンなどを用います(図27)。


ヒートガンを使った熱収縮チューブの使い方はこちらの動画などで紹介されています。これに倣って、ローラーを熱収縮チューブでコーティングします。
ローラーを熱収縮チューブに入れ、加熱していきます(図28)。あまり長時間熱風を当てすぎると中のローラーが変形してしまいますので、できるだけ短時間で終わらせます。ピッタリと熱収縮チューブが張り付いたら完成です。これにより、ローラーのグリップが強くなります。必要な個数を用意したら、「ホイールの組み立て」の図4のように以降組み立てるだけです。
TPU製ローラーを作る
また、そもそもの素材を変えてしまうというのも有効です。中でもグリップを得る上で効果的であるのがTPU素材です。
TPU製ローラーを作成する場合は、sub_roller_for_TPUとsub_roller_pillar_for_TPUを利用してください。sub_roller_for_TPUをTPUで、sub_roller_pillar_for_TPUはPLAなどでローラー1個あたり2個印刷してください(図29)。
印刷したら、sub_roller_for_TPUの両側からsub_roller_pillar_for_TPUを差し込みます(図30)。

こちらも必要な個数を用意したら、「ホイールの組み立て」の図4のように以降組み立てるだけです。
具体的な使い方とローラーのグリップ力の検証
実験をして検証してみたところ、性能は
TPU≒熱収縮チューブ加工PLA>PLA
という結果となりました。
しかし摩擦の大きな床面である場合はPLAだけでも十分に動作しますので、状況に合わせて使い分けるのが良いでしょう。またTPUローラーと熱収縮チューブによる加工を施したPLAローラーでは両者の性能はほぼ同等であったため、ご自身の環境で作りやすい方を選んで作成してください。
詳細は以下の記事で解説しています!
最新情報はこちら!
