メカナムホイールを作る! 3Dプリンタで印刷&簡単組み立て 検証編
はじめに
この記事は別記事で紹介した、3Dプリンタで簡単に印刷&組み立てができるメカナムホイールの性能を検証するものです。別記事の方をご覧になっていない方はまずはそちらを御覧ください。
ローラーのグリップによる性能差を検証しよう
前回の記事で3Dプリンタで簡単に作れるメカナムホイールとその組み立て方の解説をしました。その際、床面によってはよりグリップが必要になる場合があり対策が必要であるということを説明しました。
その主な選択肢は熱収縮チューブによる加工とTPUによる印刷でした。またその際のおおよそのグリップ性能は
TPU≒熱収縮チューブ加工PLA>PLA
であると紹介しました。
本記事では実際に性能の検証実験の内容に触れ、このあたりを深堀りしていきたいと思います。
途中で検証用のロボットカーが登場し、実際にメカナムホイールを利用した実験を行っていきますが、メカナムホイールの詳細な動作についてはこちらの書籍が詳しいのでより詳細に知りたい場合はこちらを御覧ください。
実験設定
実験に使うマシン
まず検証用に簡単なロボットカーを作成しました(図1、2)。車輪を回すアクチュエータにはHiWonder製のサーボモータLX-1501を使用しています。このサーボモータをモータモード(無限回転)で利用します。その他モバイルバッテリー、リチウムイオン電池を搭載しており、サーボモータのコントロールはArduino Uno R4 Minimaで行います。


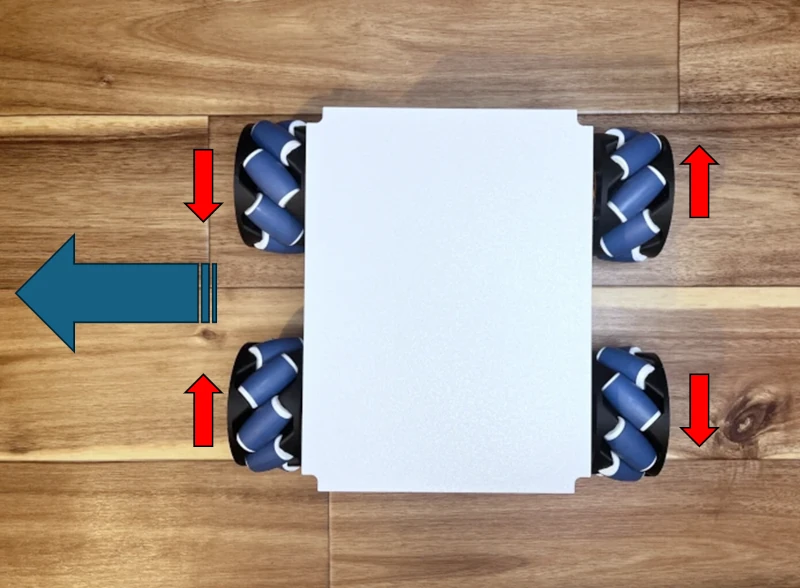
今回の実験では全方向移動型車輪であるメカナムホイールならではの動きとして、横方向へ移動する動作で検証を行います。横方向への移動は図3のような車輪の動きで実現できます。
各種ローラーとメカナムホイール
今回の実験では6種類のローラーを作成し、比較していきます。具体的には以下の6種です。
- PLA製(PLA)
- 凹凸ありPLA製(PLA-B)
- 熱収縮チューブ加工PLA製(PLA-HST)
- 熱収縮チューブ加工凹凸ありPLA製(PLA-B-HST)
- TPU製(TPU)
- 凹凸ありTPU製(TPU-B)
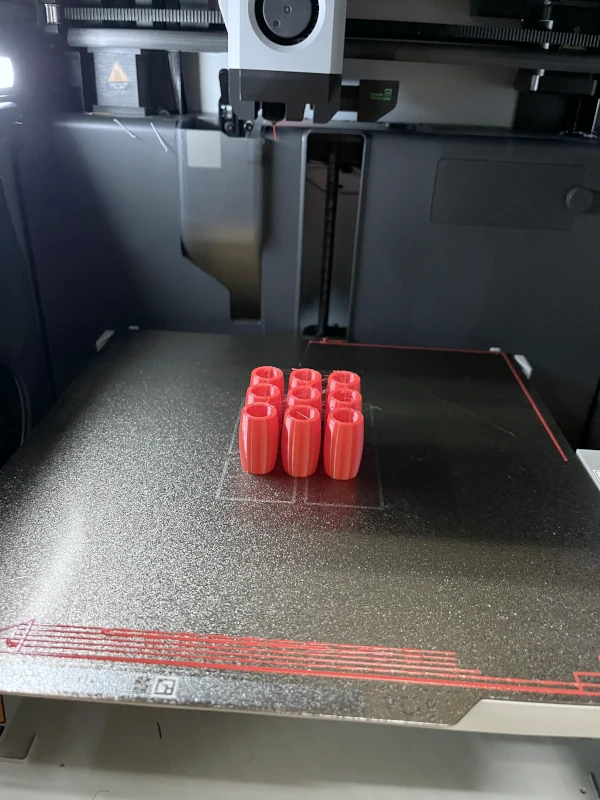
HSTはHeat Shrink Tubeの頭文字です。検証用に凹凸をつけたローラーもそれぞれに用意しています(図4)。PLA製、熱収縮チューブ加工を施したPLA製、TPU製(図5)のそれぞれに凹凸ローラーを用意した計6種です。熱収縮チューブでの加工方法は前回の記事を御覧ください。
印刷は全てBambu Lab X1 Carbonで行っています。また今回用いたフィラメントはPLA、TPUとなっています。TPUの印刷には乾燥機も使っています。

6種全てのメカナムホイールを用意します(図6、7)。色による違いはありません。


実験フィールド
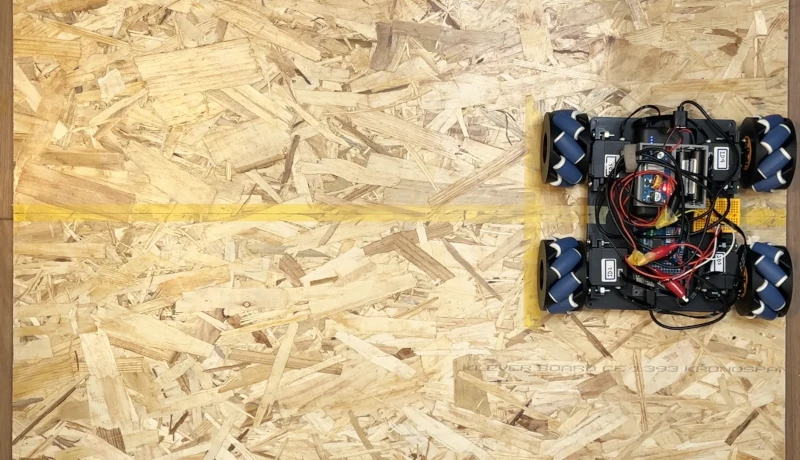
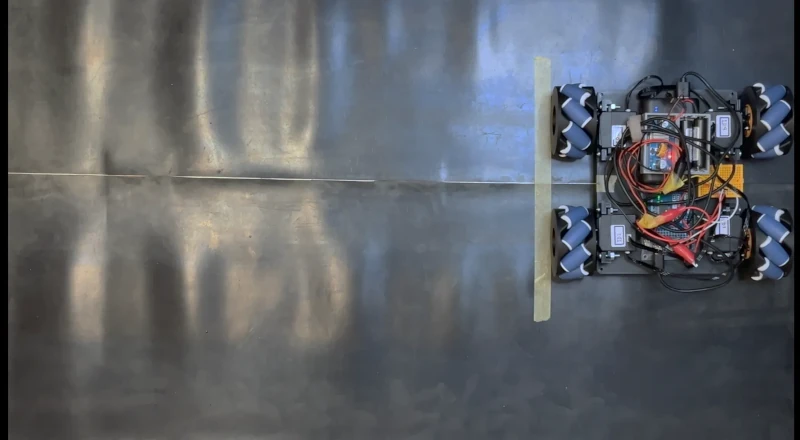
実験フィールドとして、摩擦の異なる2つの床面を用意しました。比較的滑りやすいツルツルとした床面として木製合板(図8)と摩擦の大きなゴムマット(図9)の2種です。
実験設定
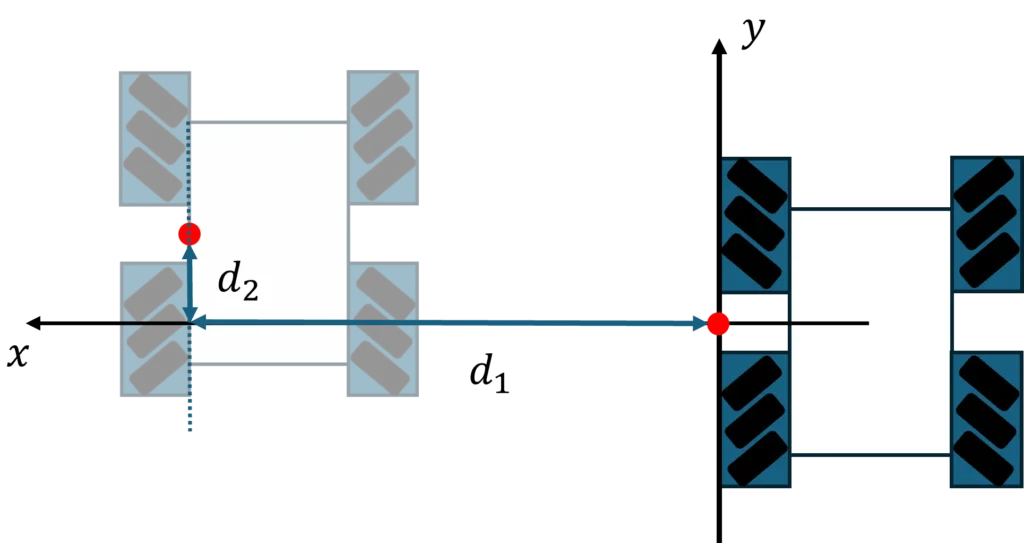
次に実験設定です。木製合板とゴムマットのそれぞれで、図3の向きの車輪の回転により左に移動します。3秒間車輪を回転させその移動距離を測定します。移動距離は図10の\(d_1,d_2\)の2つについて測定します。ローラーが空転してしまうなどせず力を伝達できれば\(d_2\)は0、そしてより大きな\(d_1\)となるはずです。
6種の各ホイールに対しそれぞれ5回ずつ実験を行い、結果を分析していきます。
実験結果
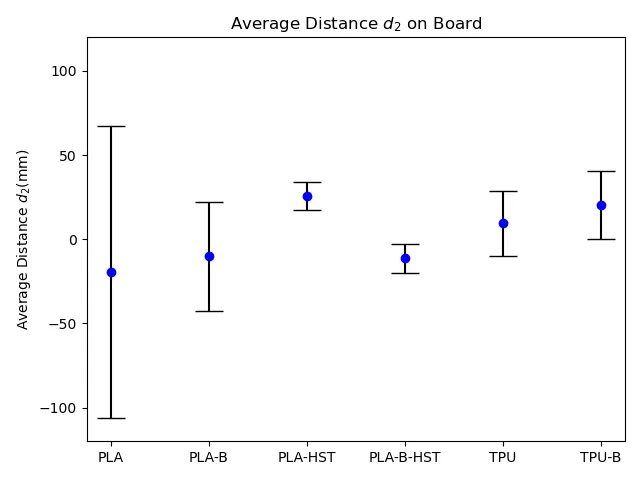
それでは実験結果です。まずは木製合板での結果です、\(d_1\)が図11,\(d_2\)が図12となります。縦軸がそれぞれ\(d_1\)、\(d_2\)、5回の試行の平均で単位はmmです。またエラーバーは標準偏差です。つまり大きいほどばらつきが大きいということになります。
図11から、加工無しのPLAローラーはグリップが足りずうまく移動できないことがわかります(PLA、PLA-B)。またエラーバーからばらつきも大きく不安定であることがわかります。一方で熱収縮チューブによる加工を施したものは全般的にばらつきが小さく安定し、かつある程度の距離を移動できていることがわかります(PLA-HST、PLA-B-HST)。なお、後のゴムマットでの実験結果から\(d_1\)の上限値はおおよそ400mmであることがわかるため、PLA-HSTは摩擦の大きな床面とほぼ同等の距離が移動できたことがわかります。またTPUにおいてもPLA-HSTと比べそれほど大きな差はなく、十分に機能していると言えるでしょう。
一方で凹凸は性能に大きく影響していない、あるいはわずかに悪影響となりました(PLA-B、PLA-B-HST、TPU-B)。
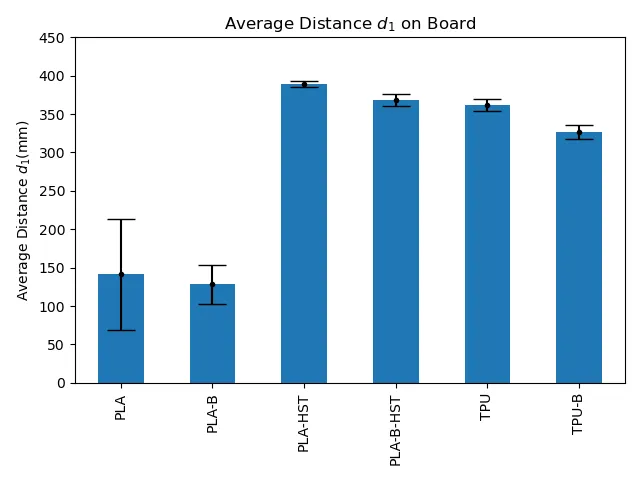
図12からは各回のばらつきの大きさが読み取れます。やはり熱収縮チューブでの加工が安定しており(PLA-HST、PLA-B-HST)、TPUも多少差はあるものの安定しています(TPU、TPU-B)。
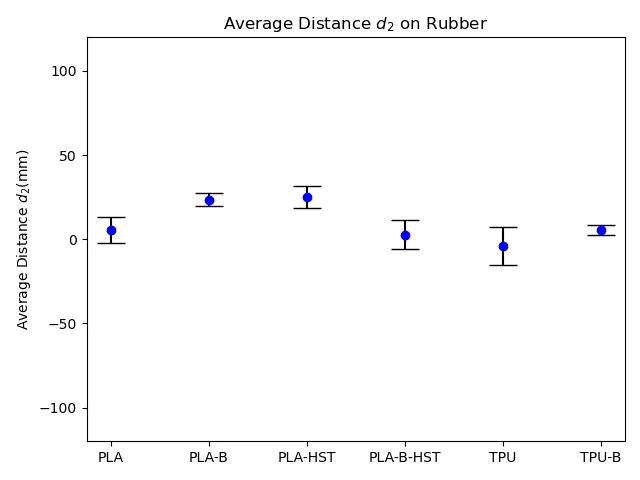
続いてゴムマットでの結果です。\(d_1\)が図13,\(d_2\)が図14となります。こちらは床面の摩擦が大きいため、滑りやすいPLA素材のみでも十分に性能が発揮できると予想できます。では実際に見てみましょう。
図13から、6種類とも結果にほぼ差がなく、また結果のばらつきも非常に小さいことがわかります。最も良い結果のPLA-HSTの結果が400mm程度であり、かつ他も性能差がないことから、今回の実験設定における\(d_1\)の上限値は400mm程度であると考えられます。
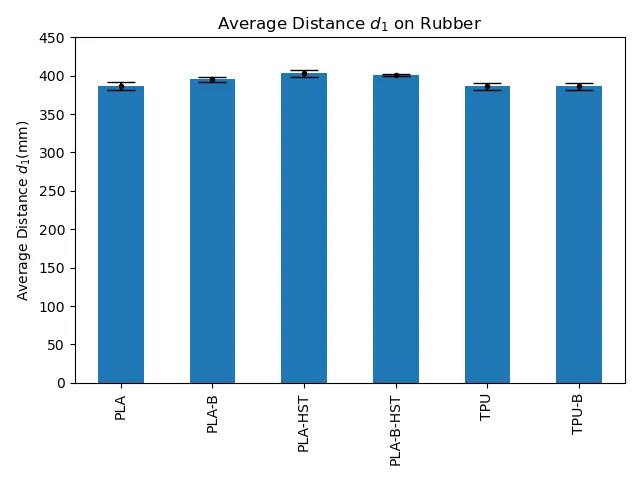
図14から、\(d_2\)のばらつきも値も全体的に小さいです。つまり摩擦が大きい床面では6種全てで問題なく機能していると言えるでしょう。
結論
これらの結果をまとめると、
摩擦の大きい床面ではPLA製ローラーを加工せず用いても問題なく機能する。
と考えられます。
一方で滑りやすい床面では熱収縮チューブによる加工が最も良い結果となりました。しかしTPU製でも大きな差はなく、十分機能していると考えられます。
また今回利用したTPU素材より更に柔軟な素材、摩擦の大きい素材を利用できればさらなる性能向上が期待できます。ということでそのグリップ性能は
TPU≒熱収縮チューブ加工PLA>PLA
と考えられ、すなわち
摩擦の小さい滑りやすい床面では熱収縮チューブによる加工を施したローラー、またはTPU製ローラーを用いると良い。
熱収縮チューブによる加工とTPUは大きな差はなく、作成しやすい方を用いるとよい。
ということです。
一方で凹凸ローラーはほぼ影響していないか、若干性能が悪化する事もわかりました。こうした結果から、Easy to Print and Assemble Mecanum Wheelのデータセットにはこの凹凸ローラーは含めていません。
最新情報はこちら!
