サーボモータSG90シリーズの固定パーツづくり
ロボットの構成要素の定番 サーボモータ
ロボットは様々な要素で構成されています。
「ロボットは、感じて(sense)、考えて(plan), 動く(act) システムである。」
この「感じて」の部分を担うのがセンサです。一方で「動く」の方を担うのがアクチュエータです。
この動作部分となるアクチュエータには色々なバリエーションが考えられますが、ロボットにおいてよく使われるのはサーボモータです。
「一般にサーボモータとは、制御信号が与えられたとき、その信号が意味する角度や位置までモータを回転させ、その角度や位置を保持する機構を備えているモータのことをいいます。」
サーボモータはミニ四駆で使われるようなDCモータとは異なりひと工夫加えており、位置や速度を調整することができます。中にはDCモータが入っていて、サーボモータの一部となっています。さらに多くの場合ポテンショメータと呼ばれる可変抵抗器が仕込まれています。これによって角度を検知し、位置を調整します。
サーボモータにもいろいろな種類がありますが、今回利用するのがTower Pro SG90です.
安い!軽い!力強い!サーボモータSG90
サーボモータといってもいろいろな種類がありますが、今回利用するのが「安い!軽い!(意外と)力強い!」サーボモータSG90です。
低価格で軽く、それでいてそれなりにパワフルなのでホビーや工作用によく用いられています。

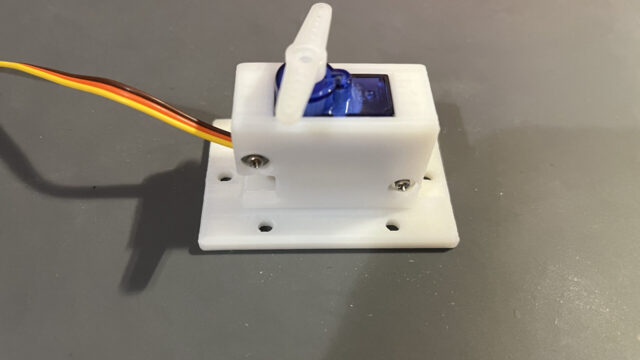
これからこのサーボモータを固定するパーツを3Dプリンタで作っていきます。
SG90とその派生
SG90には性能が異なる類似の派生シリーズがいくつか存在します。
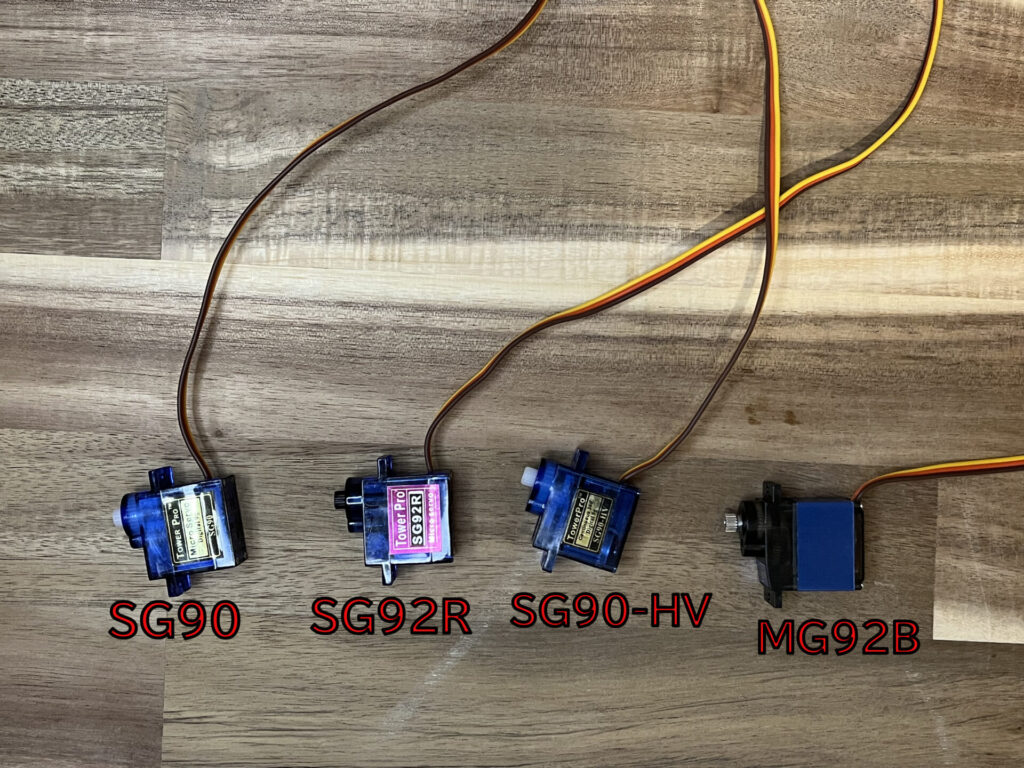
SG92RはSG90より高トルク。一方SG90-HVは無限回転サーボといって、SG90のように角度をコントロールするのではなく回転し続けるタイプです。タイヤなんかに向いています。SG90, SG92R, SG90-HVは同一の形状です。(データシートによっては寸法が微妙に異なって記載されていたり、情報元によってバラツキがあったりするのですがおおよそ同じと見て良いでしょう)
MG92Bは若干形状が異なるみたいですね。少し大きい。その分SG92Rより更に高トルクです。

これらのサーボモータはTower Proというブランドの商品です。本家ホームページはここでいいのかな? Tower Proオフィシャルサイト
ここのオンラインショップでは「他サイトで買うときは模倣品が多いから確認してね」といったことが書かれていますね。
ロボットを作っていく上でこれらサーボモータは多用することになるので、これからこの辺のサーボモータの固定パーツを作っていこうと思います。
追記
実際に作成しました!配布も行っています。