M5StickC Plus2で大幅アップグレード! 簡易的な二足歩行ロボットを作る~その10~

前回まで
前回まではVer.2.1をカラー印刷で作成し、無事完成しました。

さらなるアップグレードを目論む
早速前回Ver.2.1と称した新型ができたのですが、ここでもう少し欲が出てきました。
もうちょっと高性能なバージョンを作りたい
と。
例えば姿勢検知を行って転倒を防いだり、ディスプレイで状態を確認したり、ちょっとした音を鳴らしたり、もうちょっと複雑な計算ができたり…
Ver.2.1にいくつかセンサを足したりということ自体はできますが、配線が複雑になったり、取り付け位置の試行錯誤が必要だったり大変そうです。
そんな事を考えて色々調べていたところ見つけたのがこれ!
M5 StickC Plus2
有名なM5Stackシリーズの中でも比較的小型な部類のものです。ですがIMU(慣性計測装置: Inertia Measurement Unit)、ディスプレイ、ブザー、マイクなどが搭載されています。更に小型のものもありますが、こちらのほうが色々搭載されていてちょうど良さそうです。しかもちょうど最近M5StickC Plusからアップデートされたとのことで、タイミング的にも良さそうです。
また搭載されているのはESP32-PICO-V3-02でRaspberry Pi Picoから比べると計算能力も向上し、RAM, Flashなども全般的に多めなのでいろいろなことができそうです。その分、価格も上がってしまいますが…
と、いうことでM5StickC Plus2を搭載したバージョンアップ版を作成していきます。
流用できるところはそのままで
とはいえVer.2.1まででボディ部分は十分動作できるようになっているので、変更しなくてはいけないのは
・利用する回路、センサの変更
・内部の回路の収納部分
です。ただし、この際なので塗装も不要なように色が変わる箇所も組み立て式にして塗装不要にしていきます。サーボモータやバッテリーなどはこれまでと同様です。
具体的には「サーボモータ制御基板」と「超音波センサ」を変更します。GPIOピンに限りがあるのでGrove端子も効率良く使う必要があるため超音波センサはGrove対応品にします。
サーボモータ制御基板はこちらを使います。今回はスイッチサイエンスで購入しました。
Adafruit 16-Channel 12-bit PWM/Servo Driver – I2C interface – PCA9685
超音波センサはこちらです。
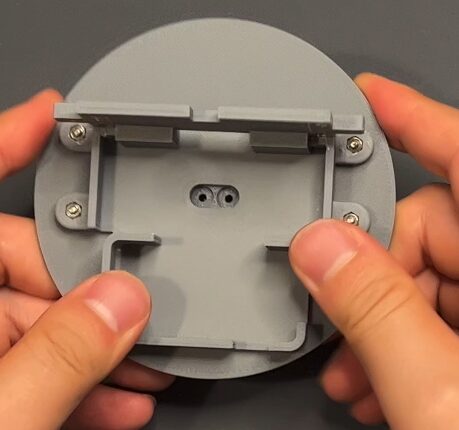
内部の設計
それではこれらの回路を収納する内部部分、センサーの固定部分を作っていきましょう。
早速ですがこんな感じになりました。
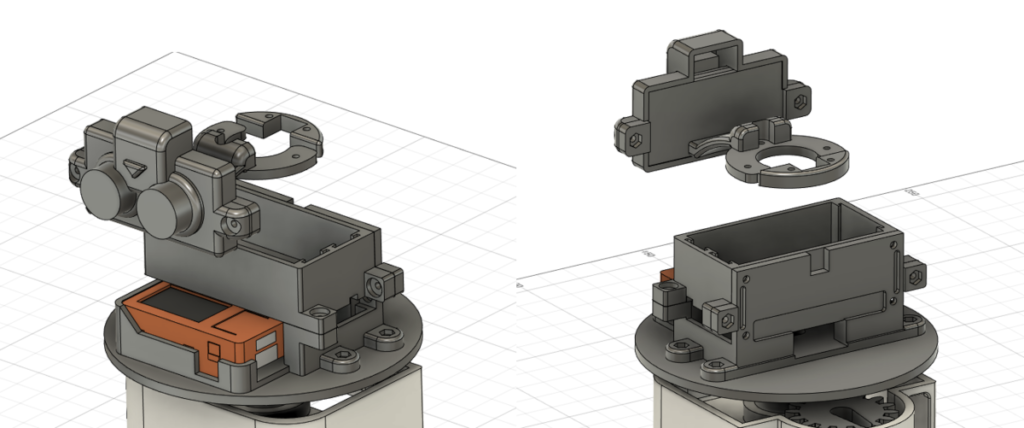
これ以外の部分は以前のバージョンをそのまま利用可能です。
印刷だ!組み立てだ!
ではバンバン印刷していきます。

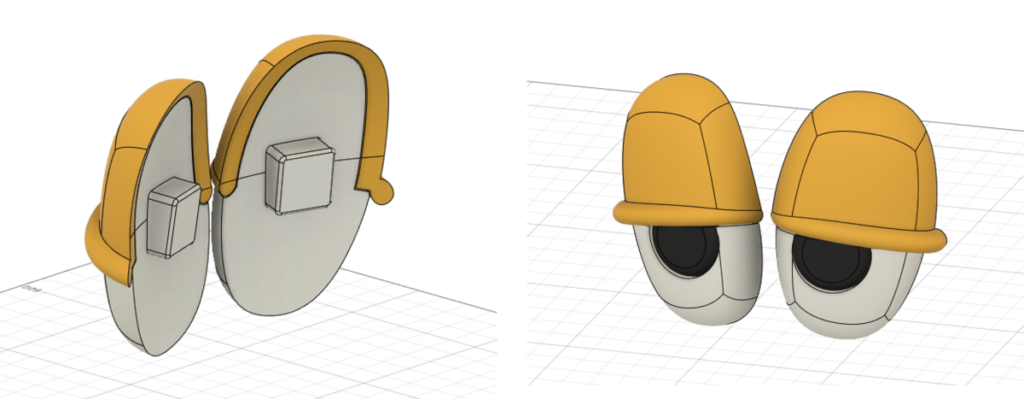
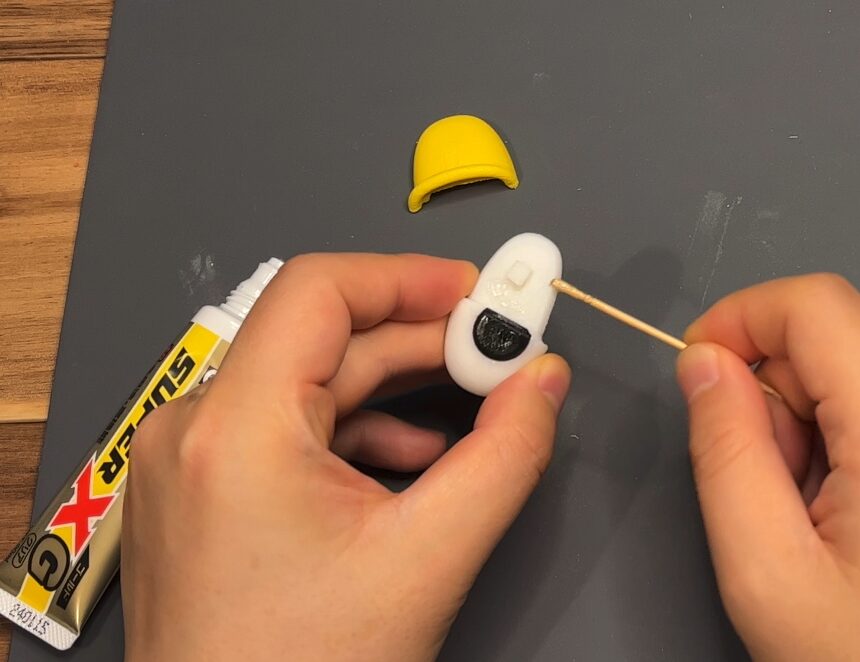
黒目の部分は黒にしたかったんですが黒のフィラメントがなかったのでグレーで印刷しました。これだけあとからちょっとだけ塗装します。
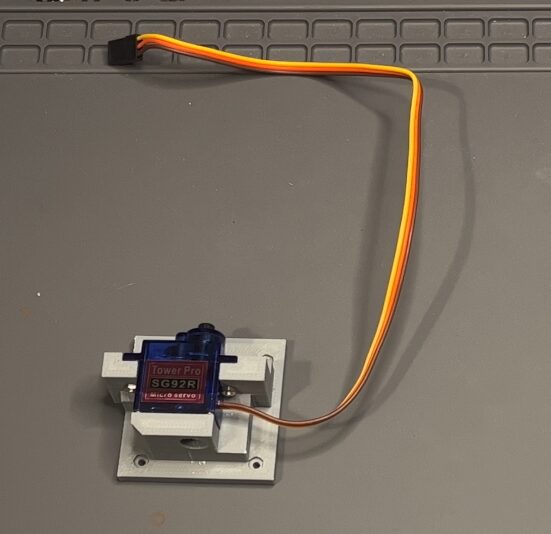
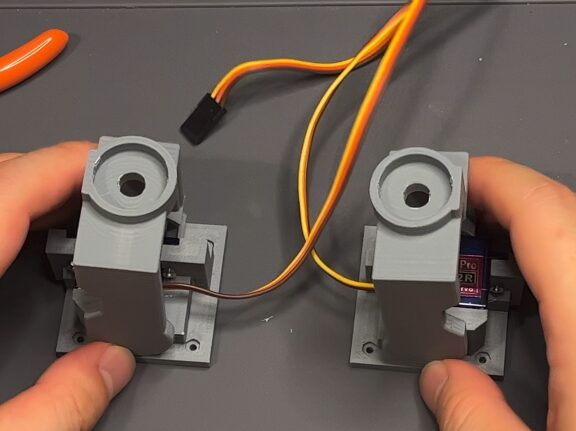
さあ組み立て組み立て。まずは脚です。
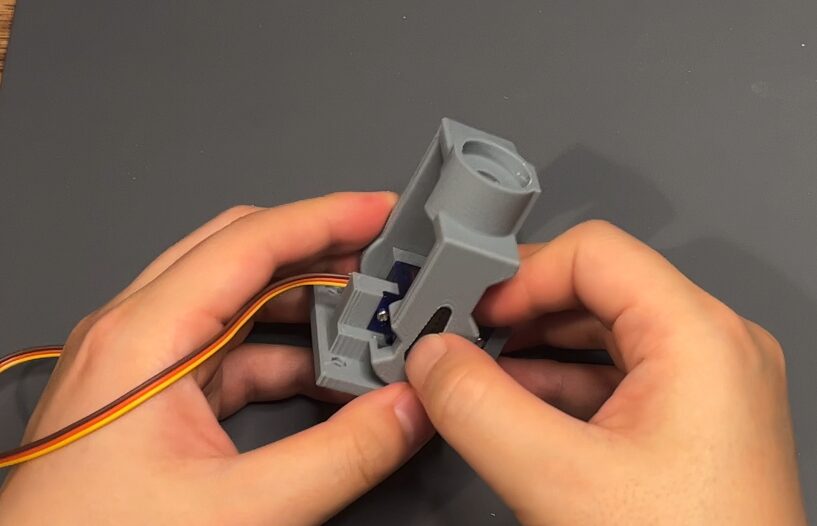
次は胴体部分です。
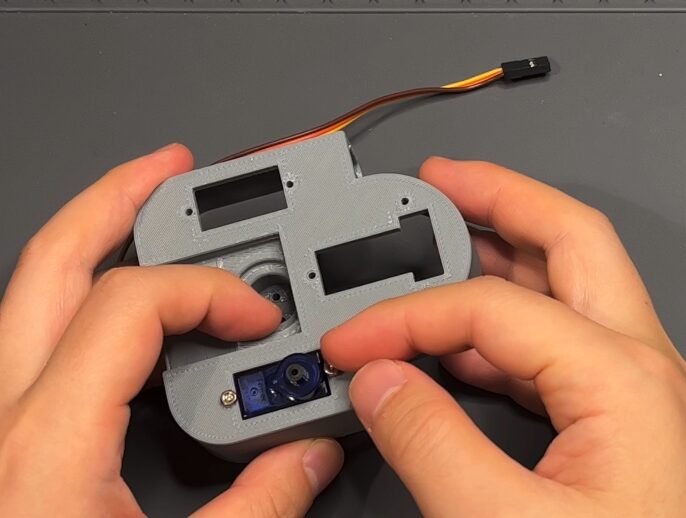
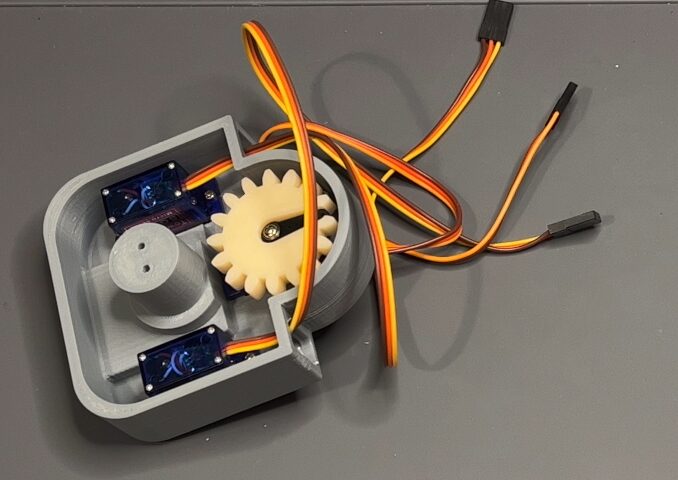
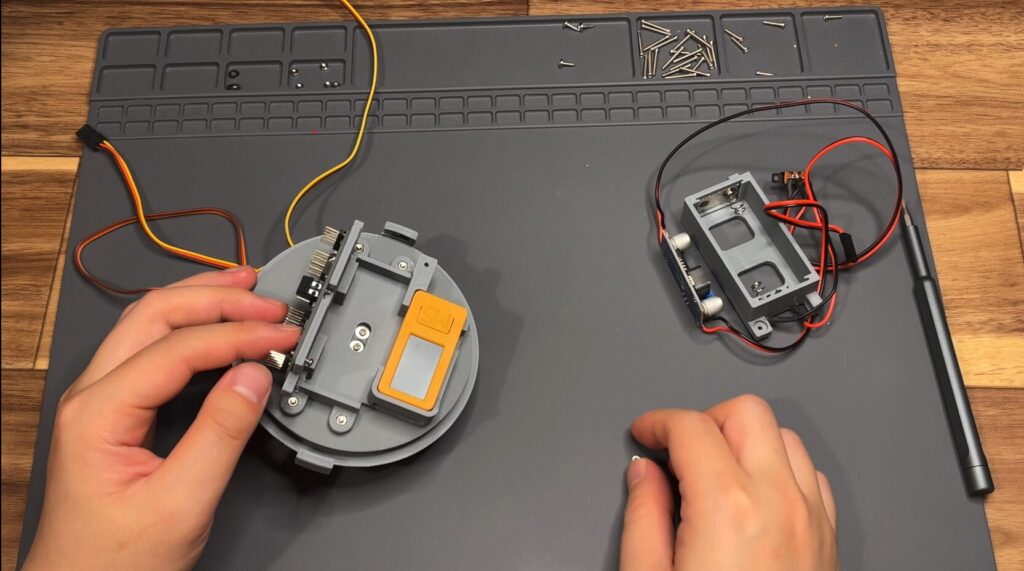
次に内部の回路です。
M5StickC Plus2もピッタリ。
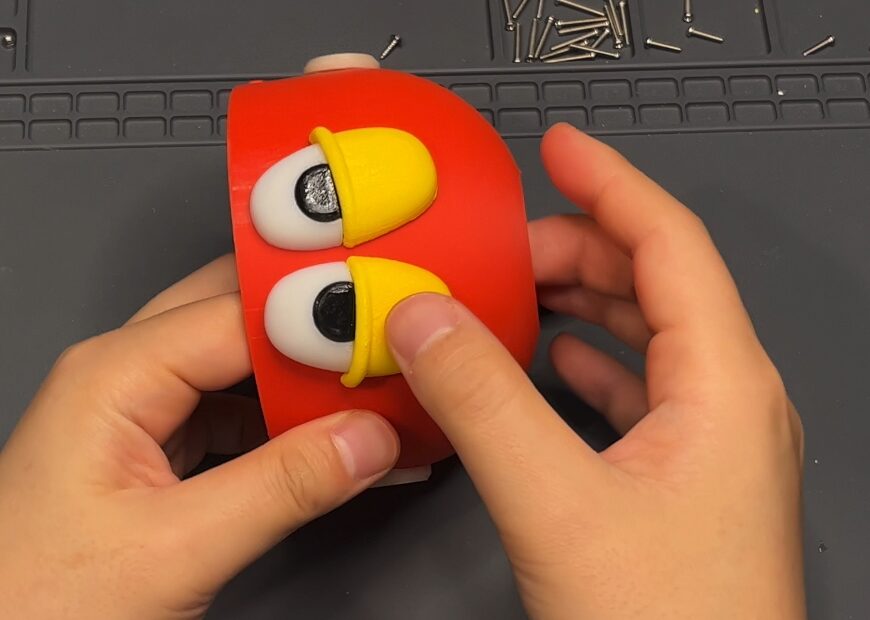
今回新たに組み立て式にした目玉も組み立てて…
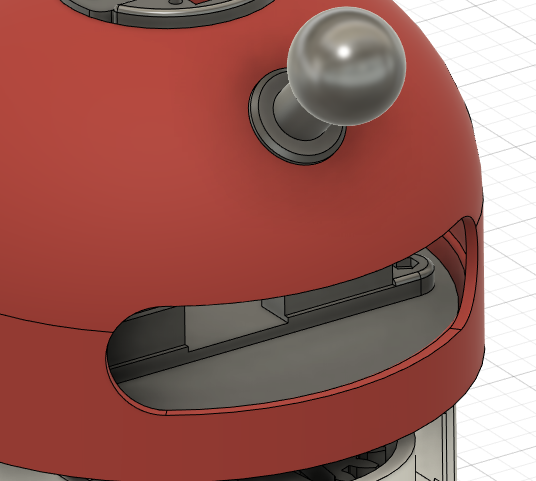
超音波距離センサも取り付けて…
そしてなんとか… 完成。

見た目的な差異は少しだけですが、内部は大幅にアップグレードされています。動作も良好です。
次回
次回は内部回路や、その他新機能について紹介していきます。
最新情報はこちら!
最新の開発状況は以下で公開中です!ぜひご覧ください!
