とりあえず完成? 簡易的な二足歩行ロボットを作る~その9~

toon_robotics_admin
前回まで
前回はVer.2の組立てを行いました。

Ver. 2の組み立て 簡易的な二足歩行ロボットを作る~その8~
ついにカラー印刷!
早速前回のVer.2を微修正したもの(Ver. 2.1とします)をカラー印刷します。これまではZortrax M200 Plus用Z-HIPSというフィラメントを利用していましたが、今回はZ-ABSを利用します(図1)。

リンク
リンク
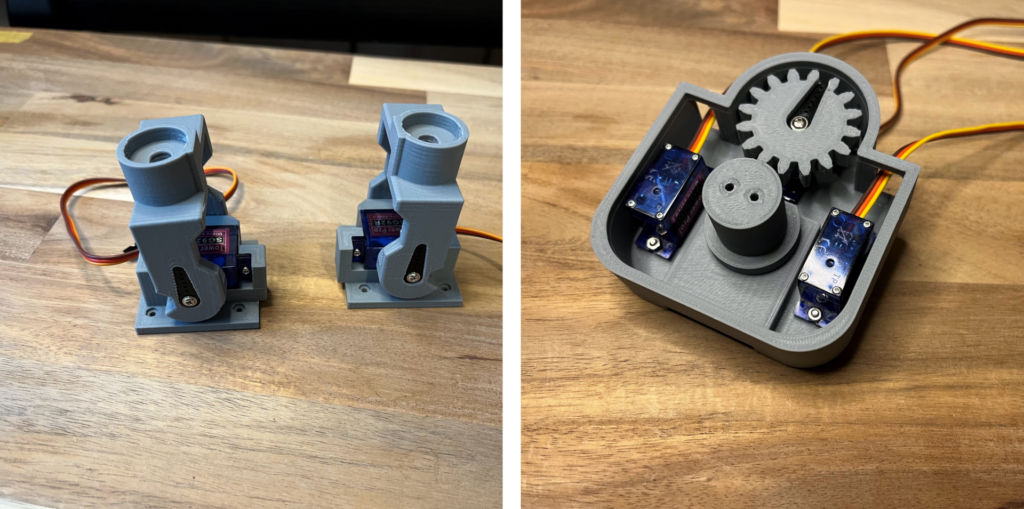
印刷したものが図2です。

それではどんどん組立てていきます。基本的な部分はVer.2と同じですが、細かい部分に修正を加えています。(図3,4)
サーボモータは以前と同様SG92Rです。
リンク
色がつくと印象も変わってきますね。

目やアンテナといった装飾パーツは塗装します。かなり面倒だったのでこれも3Dプリンタで色分けできるようにしたほうがいいですね…(図5)
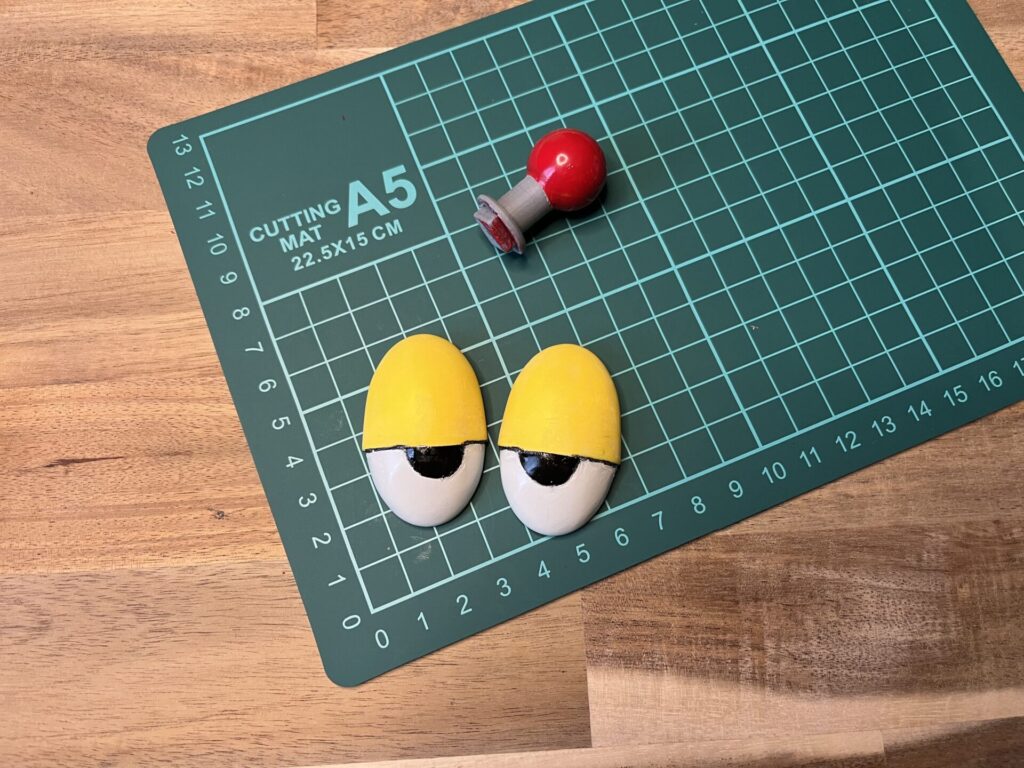
あとはこれらを頭カバーにつけてやると、メイン部分は組立て完了です、いい感じ。(図6)

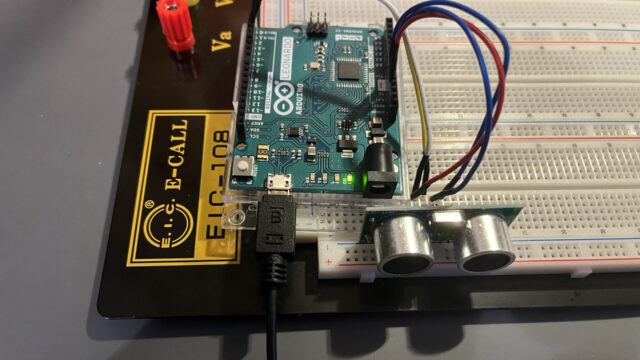
最後に超音波測距センサUS-100を使ったセンサを搭載して完成です!(図7)

動かしてみよう!
では実際に簡単なプログラムで動かしてみます。歩行モーションを実行し、超音波測距センサで障害物を検知したら首を振って止まるようにしました。
このプログラムでは以前のこちらの記事で紹介した方法で超音波測距センサUS-100を管理しています。
超音波距離センサUS-100を割り込みタイマーで自動化!(Arduino Leonardo, Pi Pico版)
リンク
まだもう少しだけ修正する点はありそうですが、おおよそ完成と言えそうです!
次回
次回からより複雑なモーションの実行や、動作用の細かな機能の実装を行っていきます。

M5StickC Plus2で大幅アップグレード! 簡易的な二足歩行ロボットを作る~その10~
最新情報はこちら!
最新の開発状況は以下で公開中です!ぜひご覧ください!
ABOUT ME

アニメ・マンガ・ゲーム・映画などに出てくる「かわいい&かっこいい」ロボットを作ろう!
技術系情報も発信中/
Let's make cute & cool robots from anime, games, and movies!