3Dプリントパーツの組立! 簡易的な二足歩行ロボットを作る~その4~
ロボットを組み立てる
前回までで一通りのパーツの3Dプリントが終わりました。今回から印刷したパーツの組立に入ります。
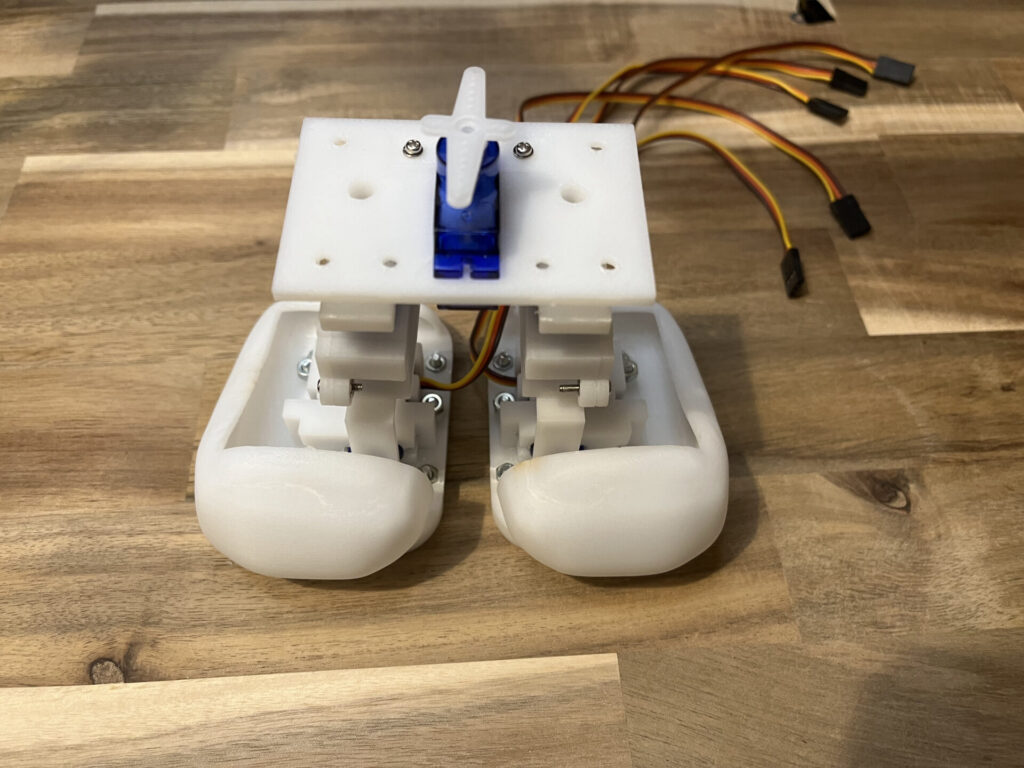
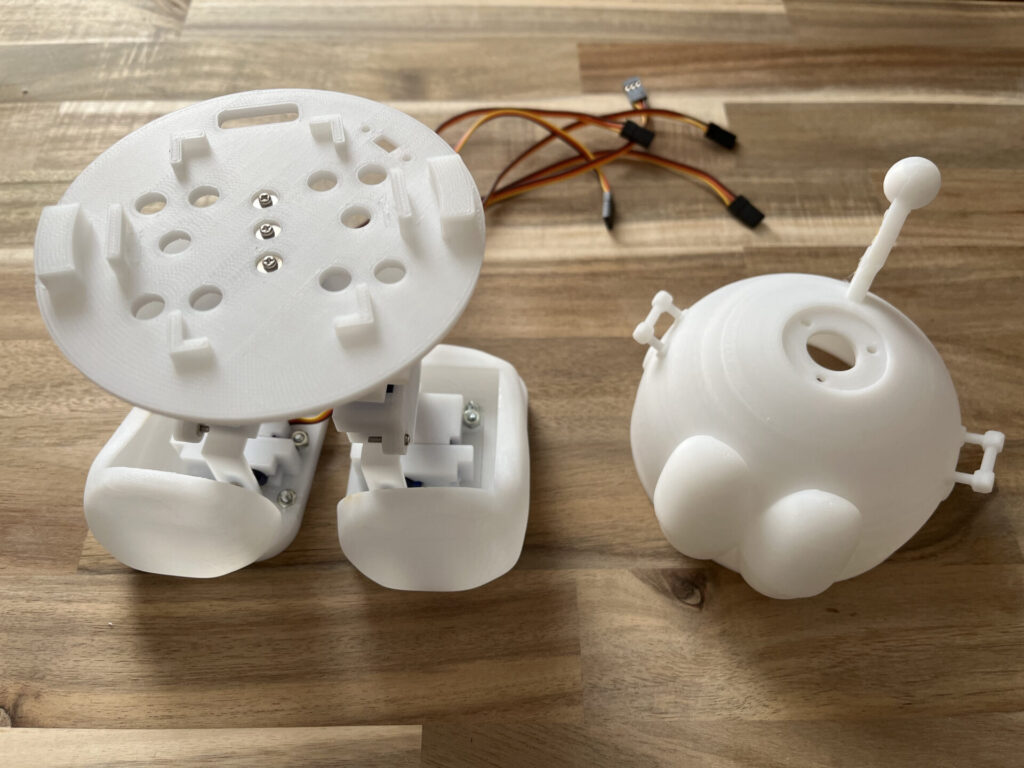
まずは脚部。脚部は最も複雑でサーボモータSG90とSG92Rを1個ずつ、両足で計4個搭載します(図1)。一つは足首部分のロール、もう一つは太もも部分のヨーの動作で使います。よりパワーが必要と予想される足首にSG92Rを配置します。
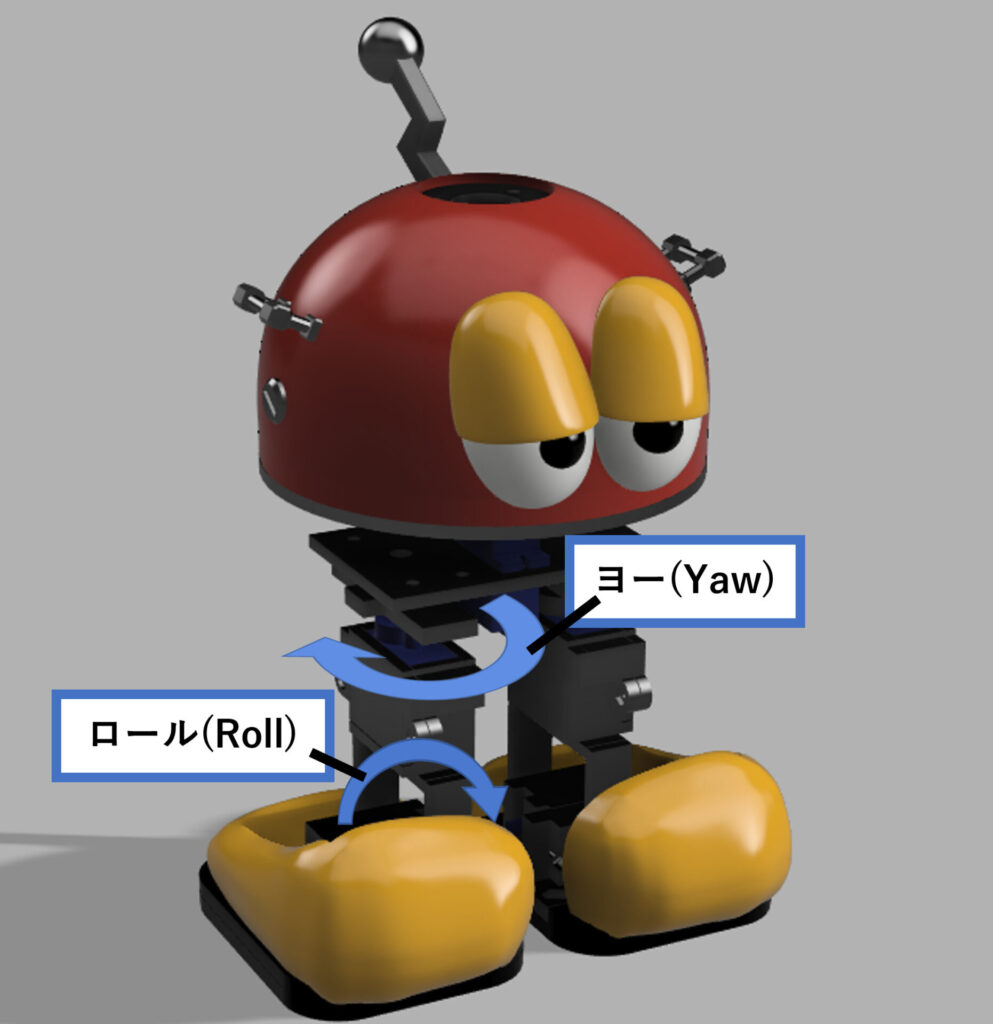
このロール、ヨーはそれぞれオイラー角というもので使われる用語で、ロール、ピッチ、ヨーからなります。
つまりざっくり言うと体の正面に対し左右に回転する動作がロール、上下に回転する動作がピッチ、水平方向に回転する動作がヨーですね。今回作成するロボットはロールとヨーだけからなります(図2)。
SG90とSG92Rを装着してみると、寸法もぴったりでした。今回は実際のSG90/92Rよりすべて0.3mm程度余裕を持たせて設計しました。このぐらい余裕を開けておかないと、ギチギチになりすぎてパーツを入れ込むのに苦労したり、ギリギリ入らなかったりということが起こります。組み立て後は図3のようになりました。

次に腰の部分です。ちょっと形が複雑すぎてサポート材を剥がすときに苦労したり、組み立てに手間取ったりするので要改善です。頭を回すためのサーボモータも搭載します(図4)。
さらにその上に頭パーツの土台を乗せます。(図5)
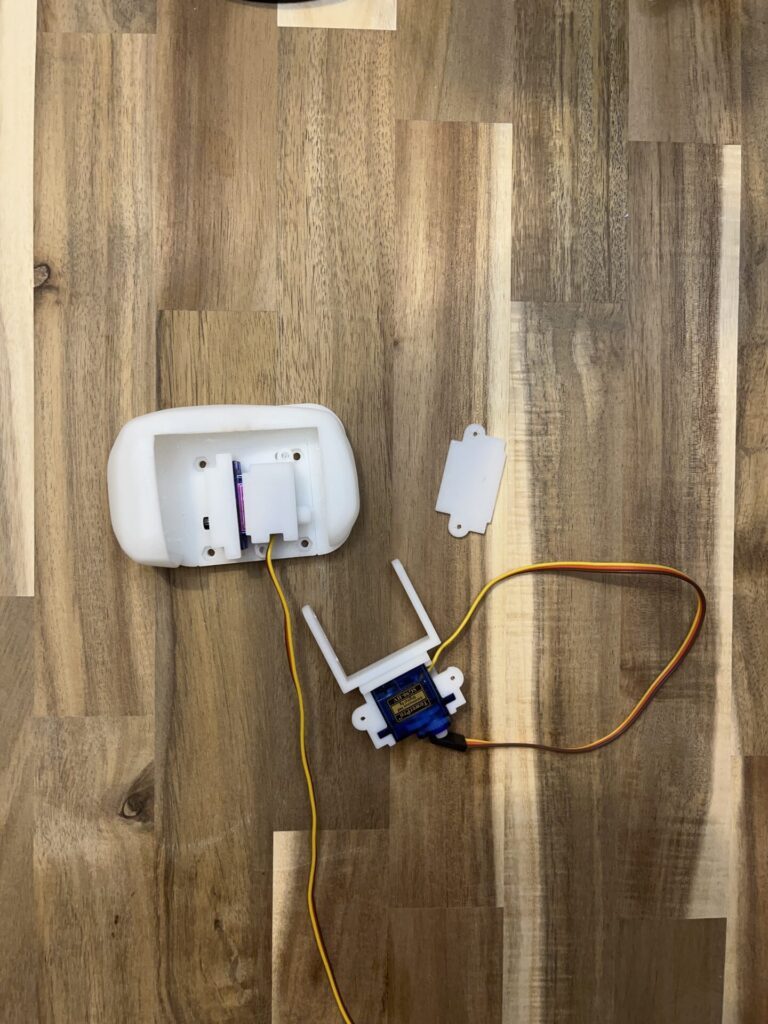
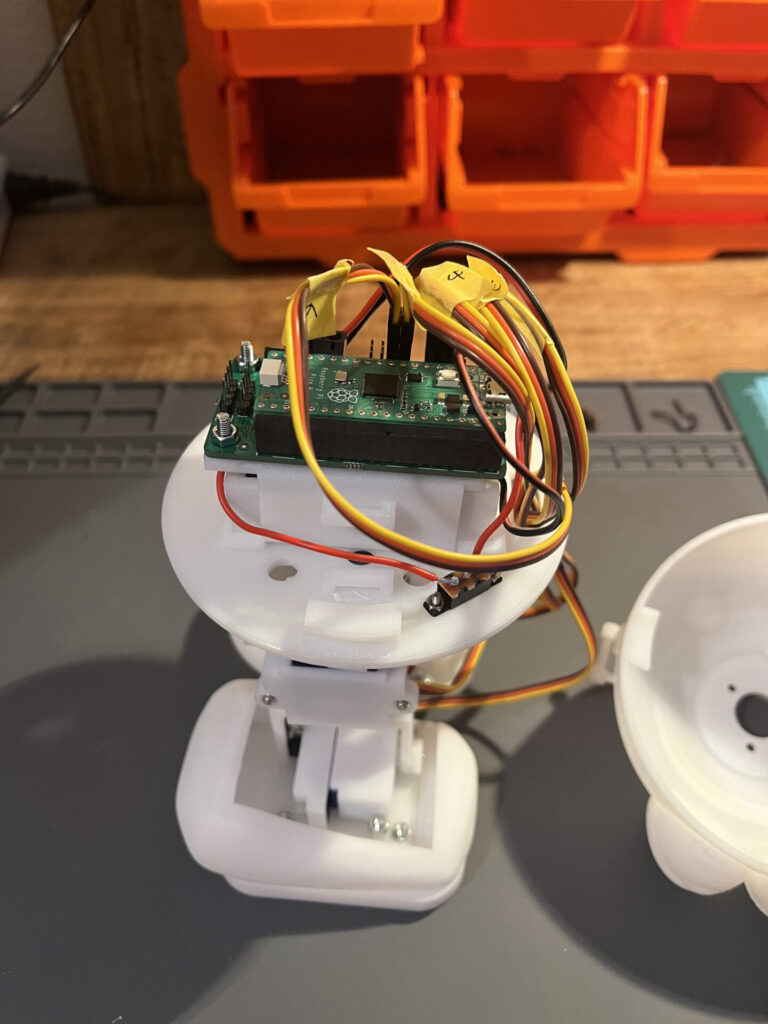
中央部には電池ボックス、Raspberry Pi Picoを載せてサーボモータのコードを配線。
電源スイッチも取り付けます。(図6)
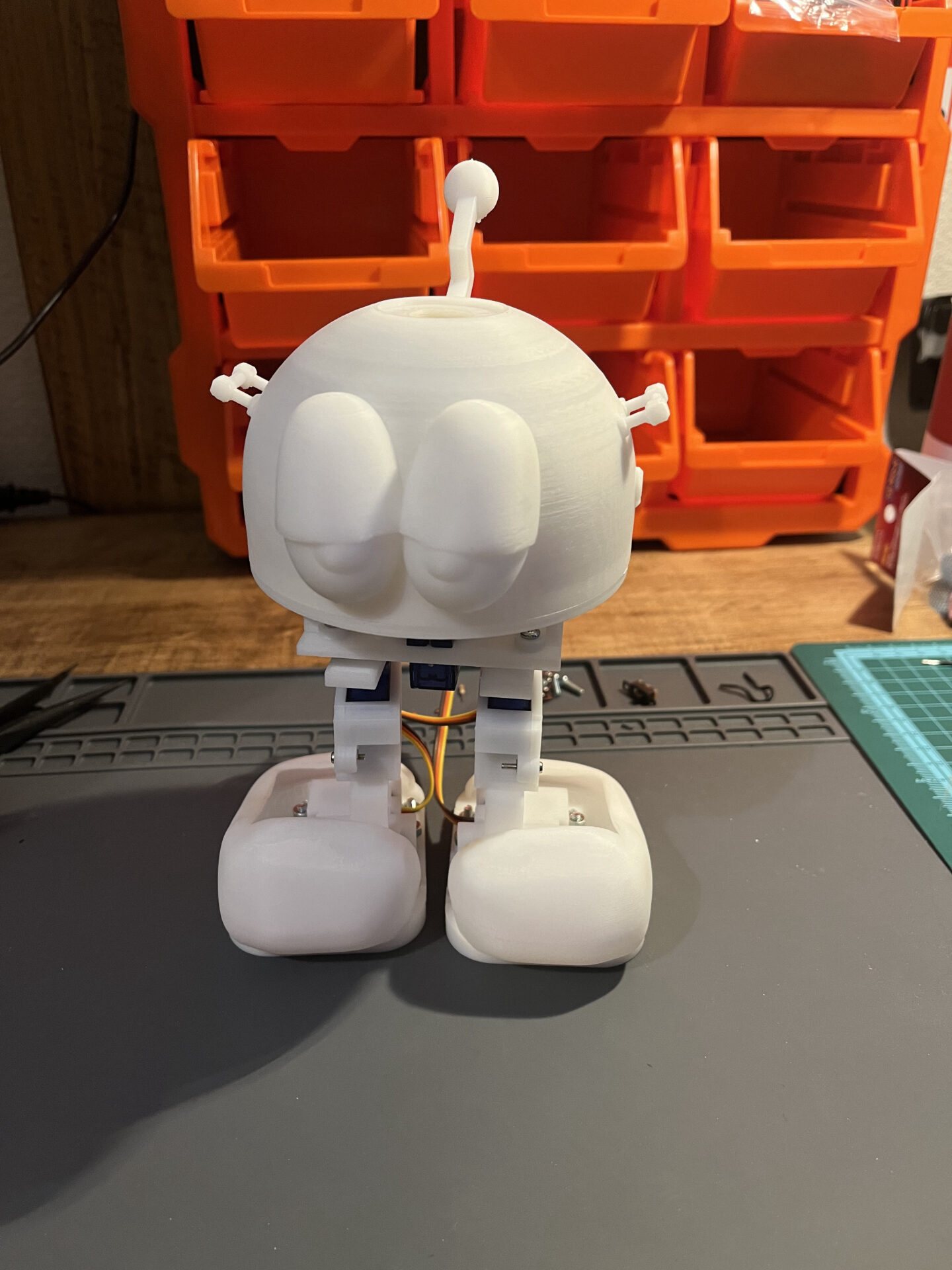
ここまでできたら、あとは頭カバーを被せて…
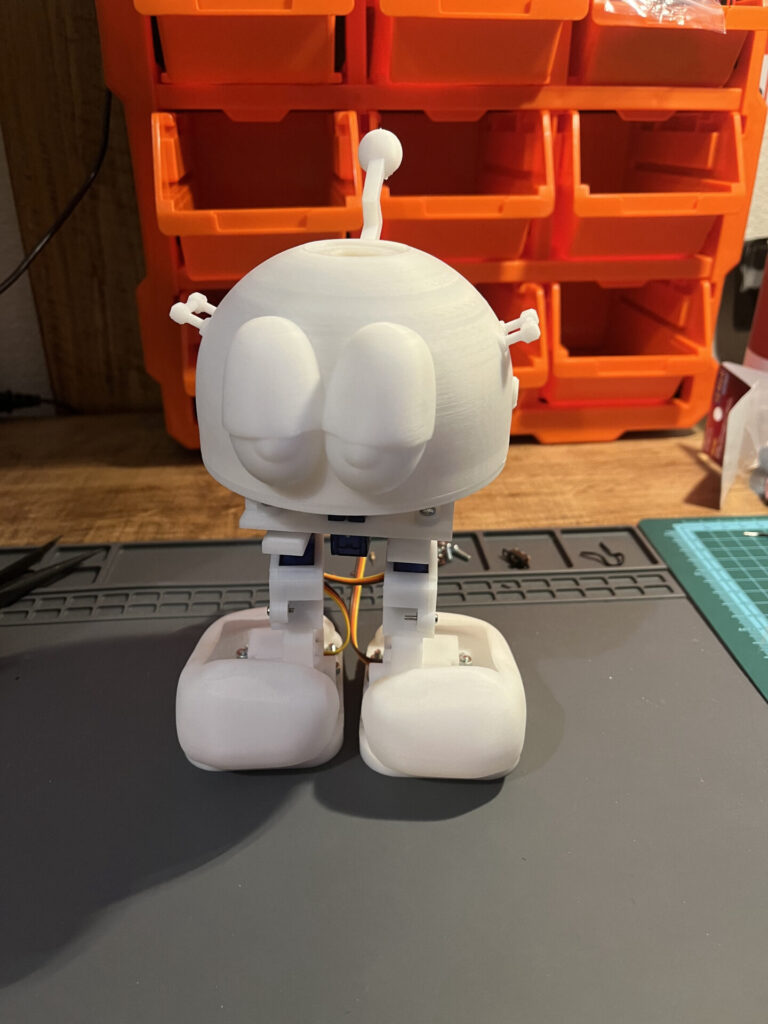
組み立て完了です!(図7)頭を固定するスクリューロック機構も案外うまくいきました。
全体が組み上がると、やっぱりワクワクしますね。サイズ感も含めて、思ったよりカワイイかも。
ここまで来たら次はいよいよ動作テストです。次回、実際に歩かせてみます!
