3Dプリントできる!SG90系列の固定パーツ ~アームver.~(STLファイル公開中)
「STLファイルの公開」にてデータ配布しています!
前回の固定パーツ
前回はSG90系列のサーボモータを固定できるパーツを作成しました。簡単に3DプリントできるSTLファイルを公開していますのでよろしければどうぞ!
SG90系列用の固定パーツ アームVer.
前回作成したのは、SG90系列のサーボモータ(SG90, SG92R, SG90-HVなど)(図1)を水平に固定できるパーツでした。(図2)

SG90本体に開いている穴は片側1つずつなので、しっかりと固定する場合は心許ない場合があります。そこでSG90を全体的に覆いつつ、固定箇所を増やしたものとしました。
今回はさらにアーム状のパーツを追加し、別方向の固定が可能なパーツを作ります。
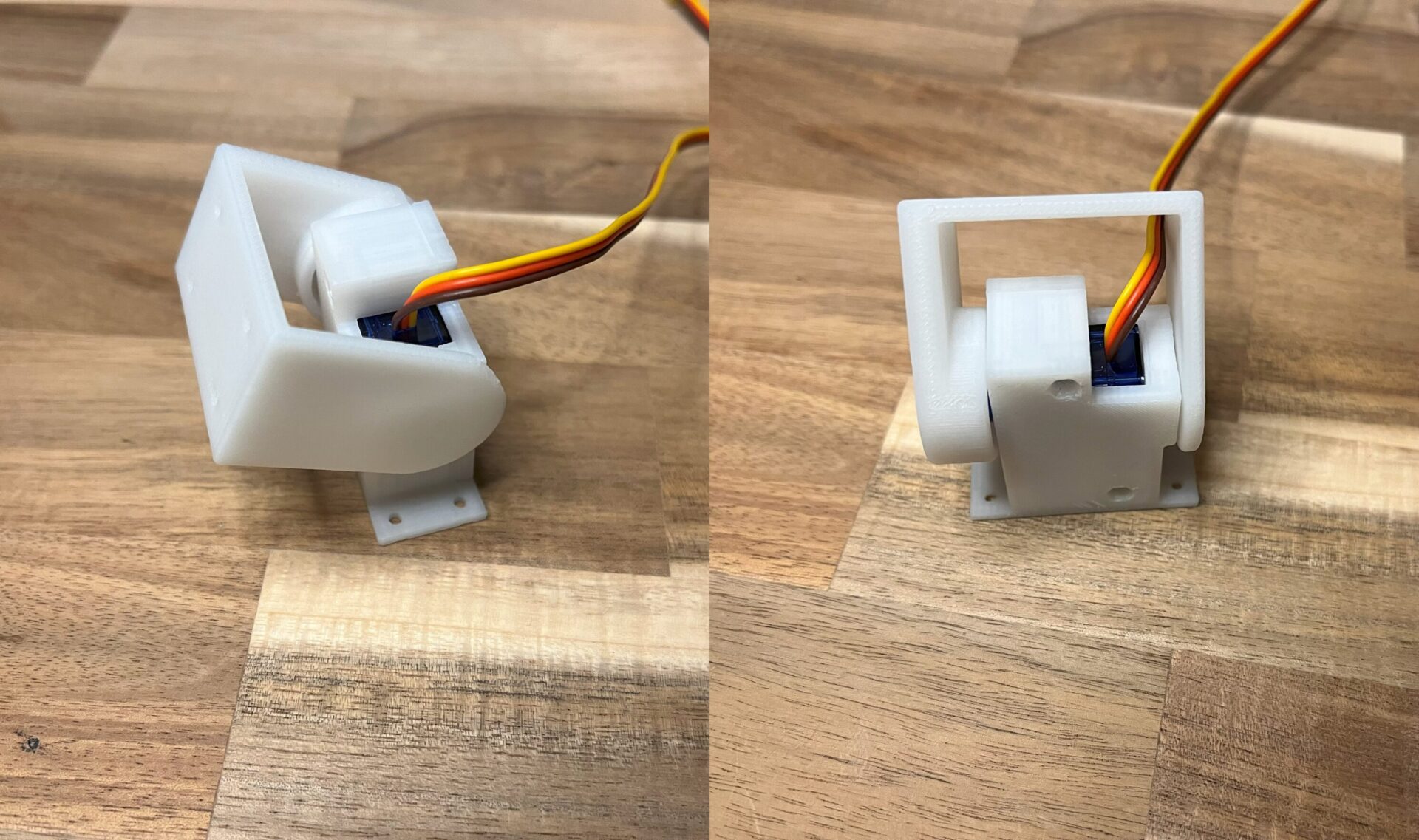
早速ですがアームver.の固定パーツはこちらです!(図3,4)
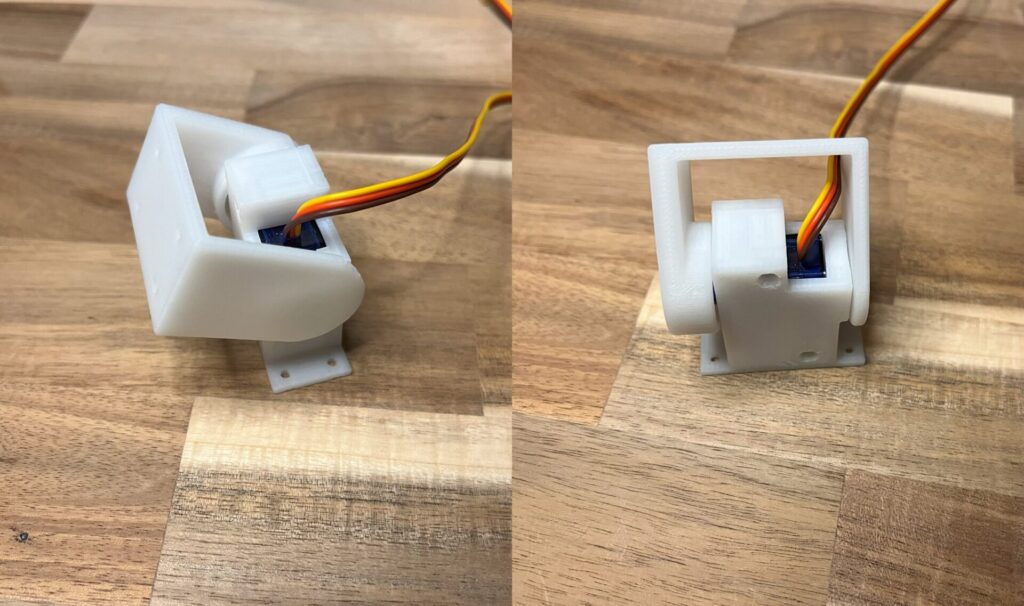
今回はメインの土台部分、カバー、アームの3つのパーツからできています。動作中の様子はこちらです。アーム部分にはM2ネジが利用できる取付穴、土台部分には固定用のM2ネジ用穴が開いていますので自由に利用することができます。
3Dプリンタで印刷
それでは3Dプリンタでの印刷について見ていきましょう。
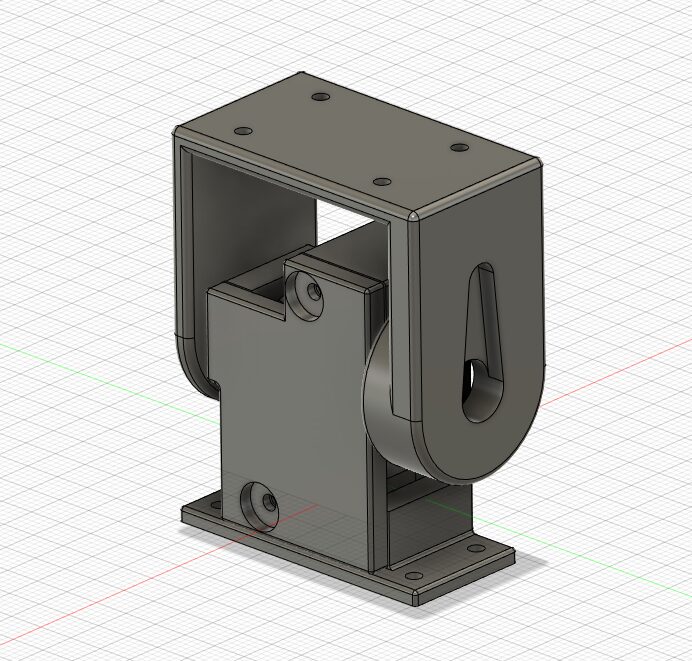
まずはメインの土台部分です。(図5)
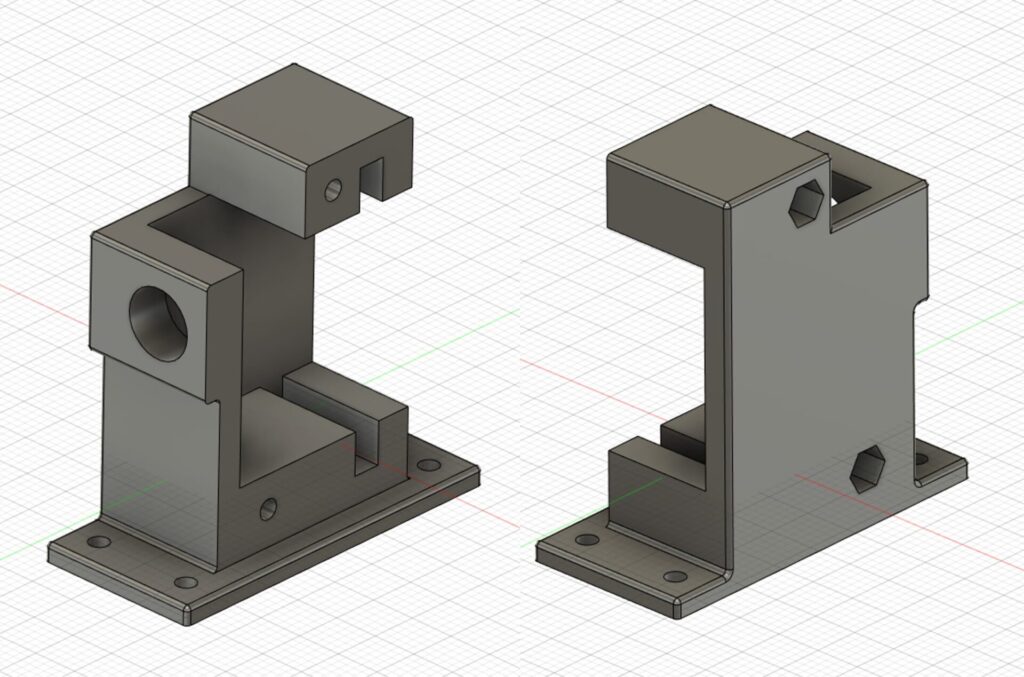
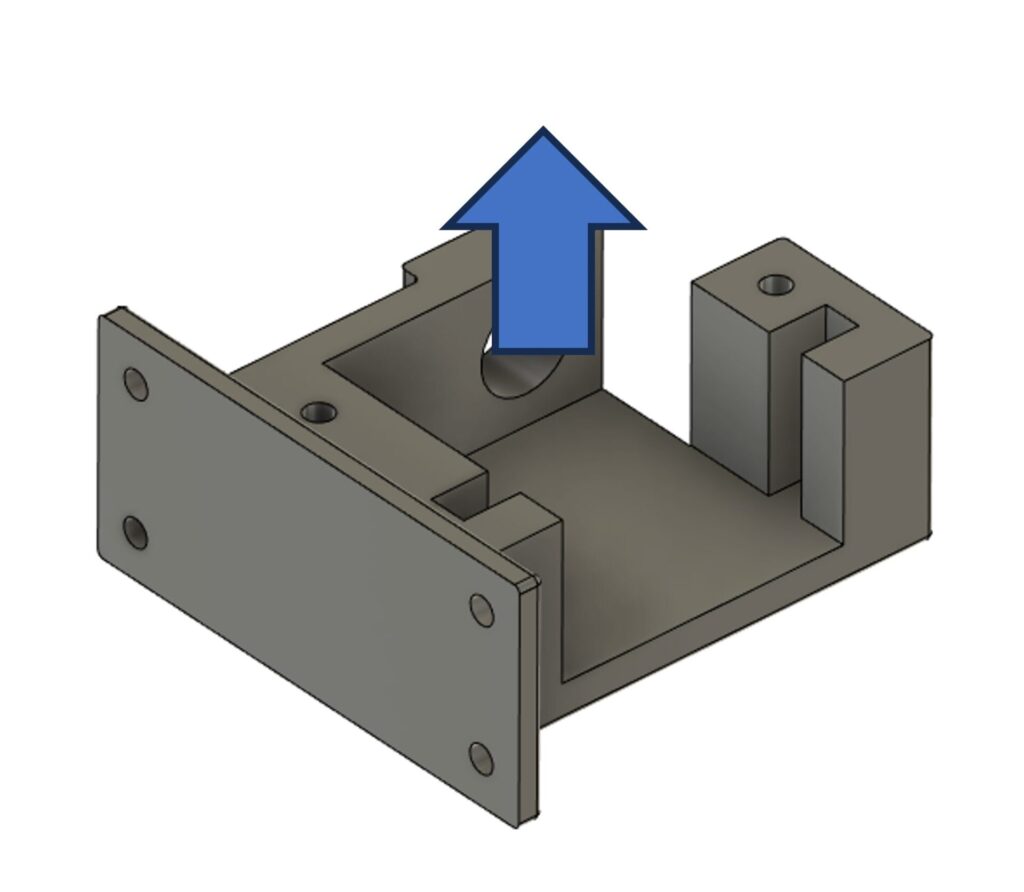
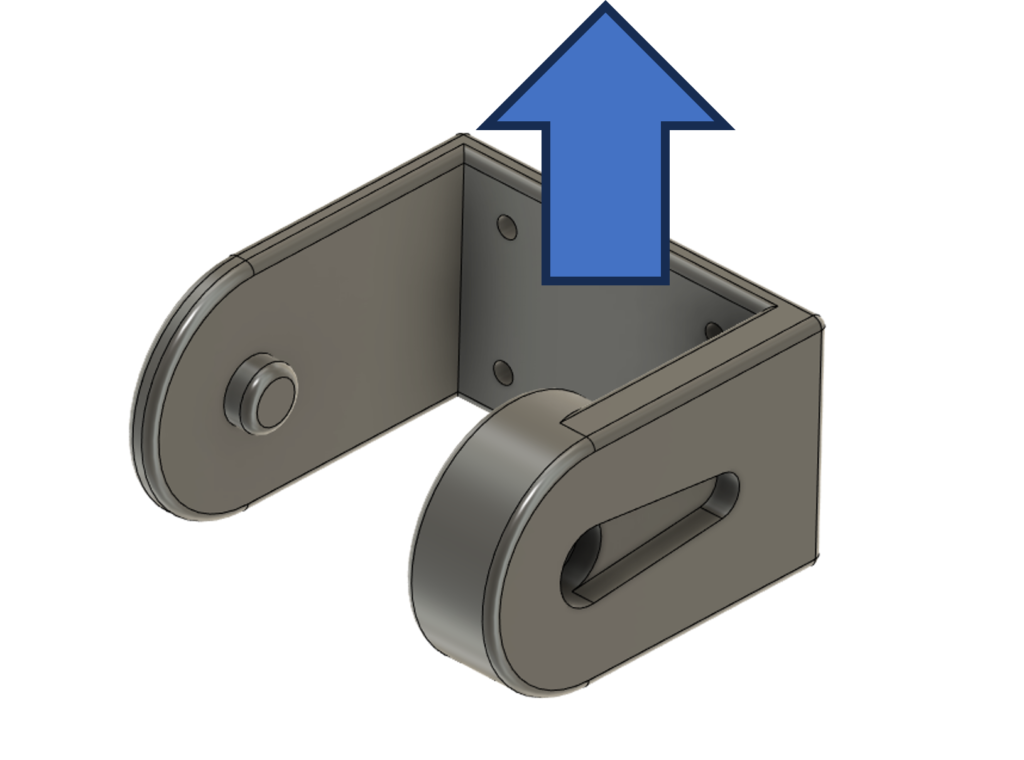
印刷する際は図6の方向に印刷すると、強度、サポート材剥がしの点でおすすめです。
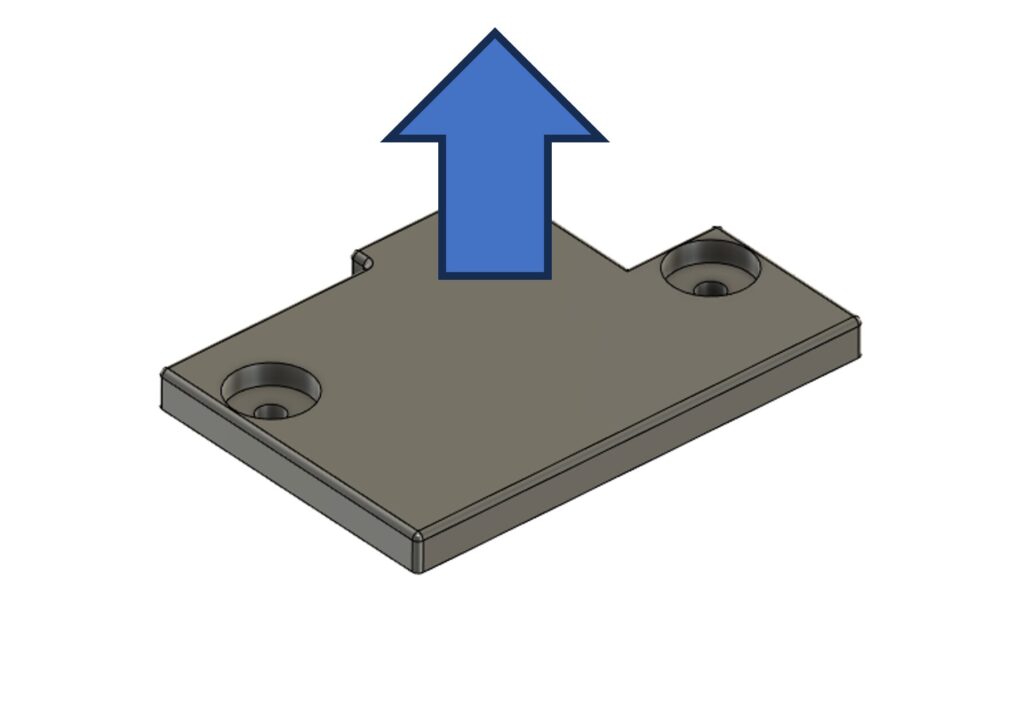
次にカバー部分です。印刷方向も接地面積の大きくなる方向で印刷すればOKです。(図7)
最後にアーム部分です。アーム部分も強度とサポート材剥がしの観点から、図8の方向で印刷するのがおすすめです。
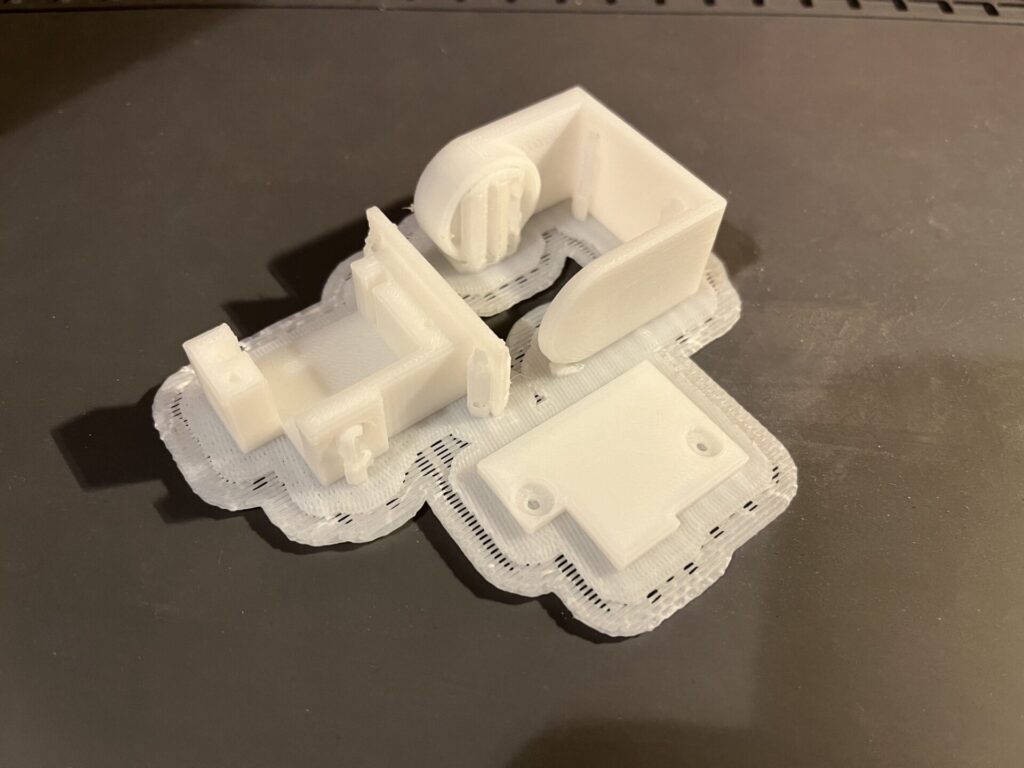
実際に印刷したものが図9です。こちらはZortrax M200 Plusを使って印刷しています。
組み立て
次に組み立てについて見ていきましょう。
まずはSG90、または同一の寸法のサーボを土台部分にはめ込みます。(図10)
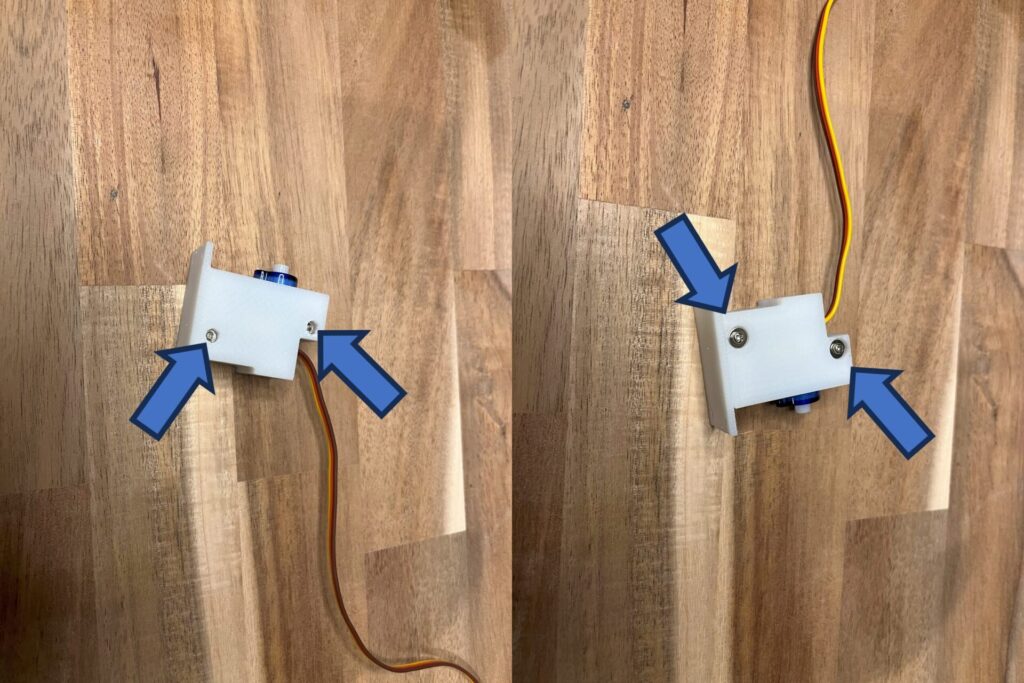
土台部分の後ろ側からM2ナットを入れ(図11左)、カバーをかぶせてM2、15mmのネジで固定します。(図11右)

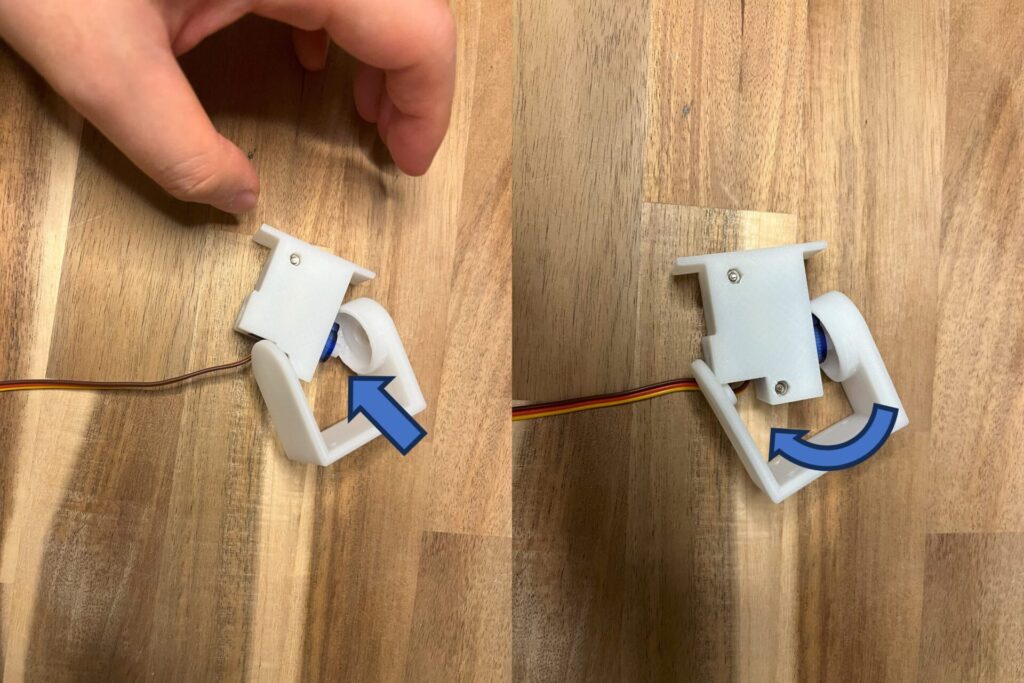
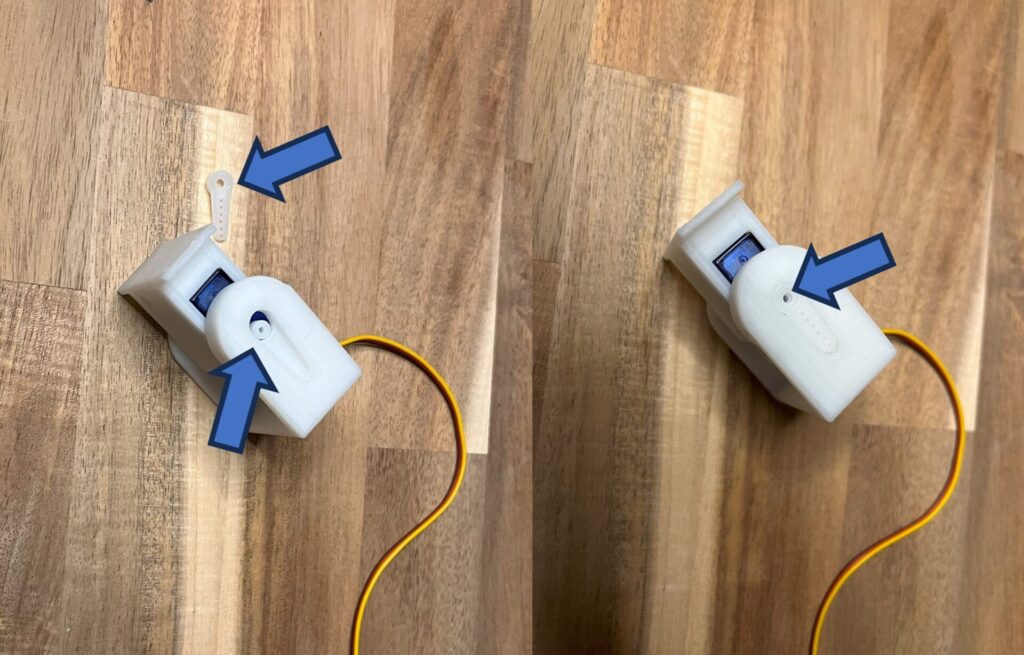
次にアームを取り付けます。サーボアームの穴が開いている方をサーボモータの可動部分にかぶせ、アームの反対側の凸部分を土台の穴に入れます。少しアームを広げながら入れる感覚です。(図12、13)

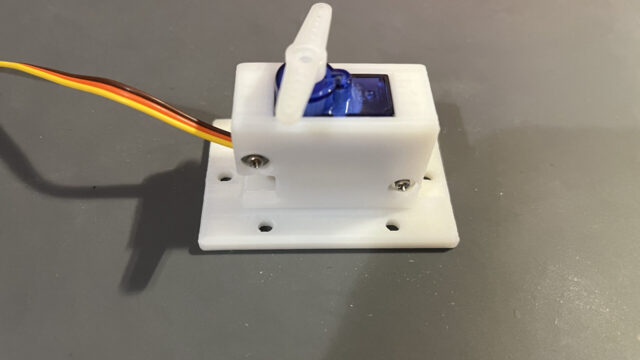
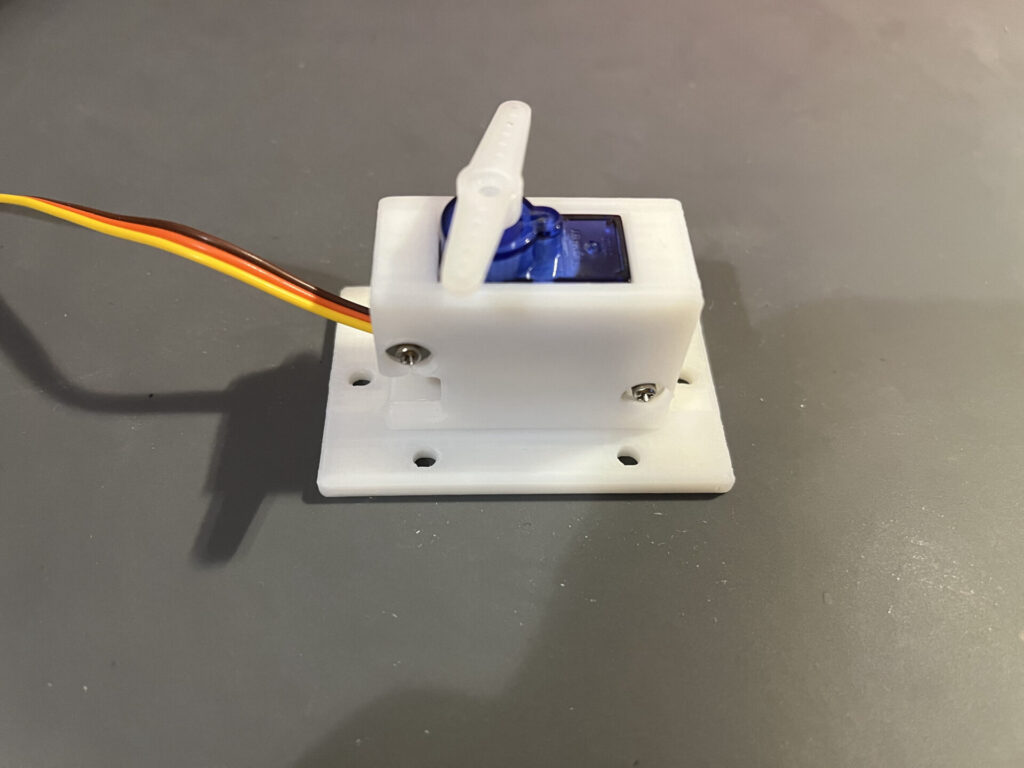
最後にサーボモータに付属のサーボホーンを取り付けます。(図14、15)
これで完成です。

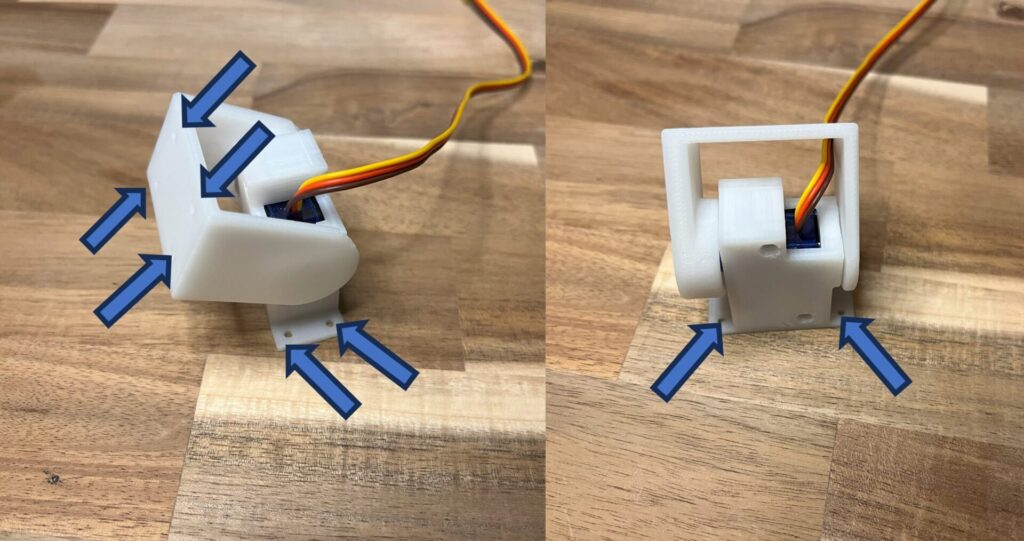
アーム部分と土台部分にはそれぞれ4箇所の固定用の穴を用意しています。M2ネジで固定することができます。(図16)
STLファイルの公開
今回作成した固定パーツのSTLファイルを以下で公開しています。ぜひご利用ください!
SG90 Series Universal Holder Arm Type
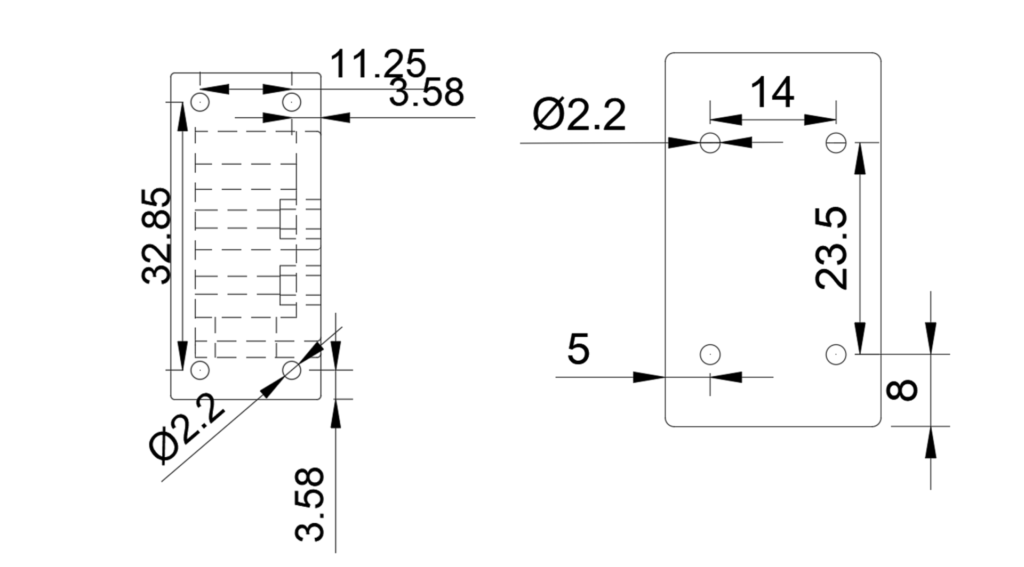
また固定穴の位置と寸法は図17のようになっています。
対応するサーボモータは以下になります。これらと同じ寸法のものであれば他のサーボモータでも利用可能です。
最新情報はこちら!
最新の開発状況は以下で公開中です!ぜひご覧ください
