Ver. 2の組み立て 簡易的な二足歩行ロボットを作る~その8~
toon_robotics_admin
Contents
前回まで
前回まではロボットのボディを改善したVer.2を開発し、印刷まで行いました。
バージョンアップだ! 簡易的な二足歩行ロボットを作る~その7~
組み立て
それではどんどん組み立てていきます。
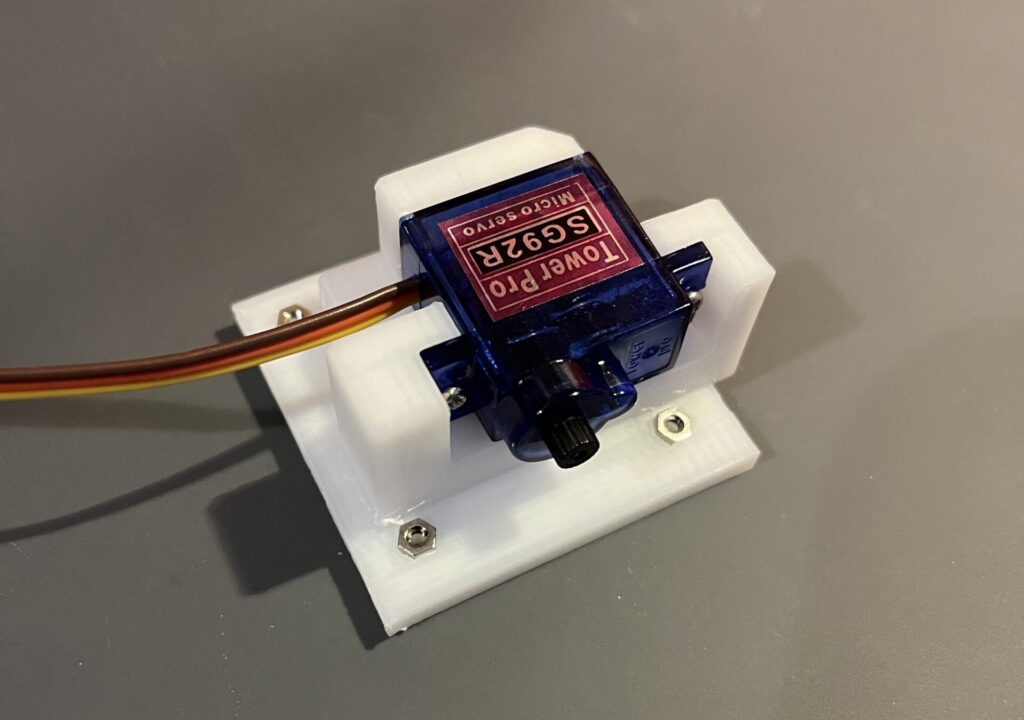
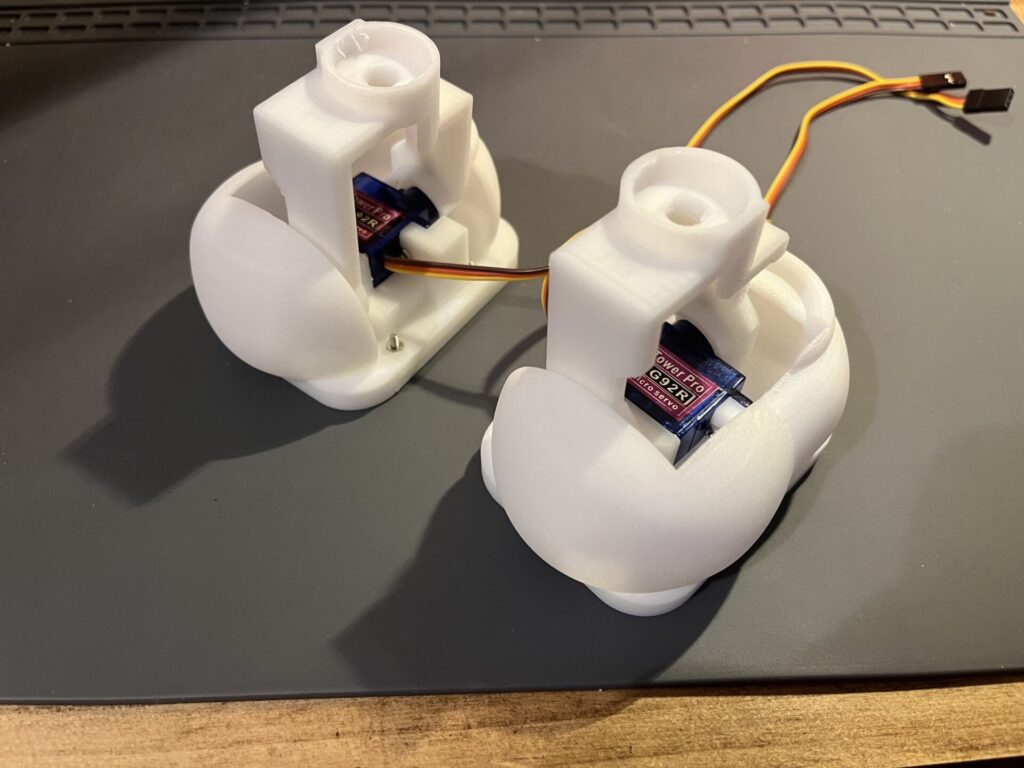
まずは足首から。サーボモータを固定していきます。前よりは大幅に組み立てやすくなりました。(図1)
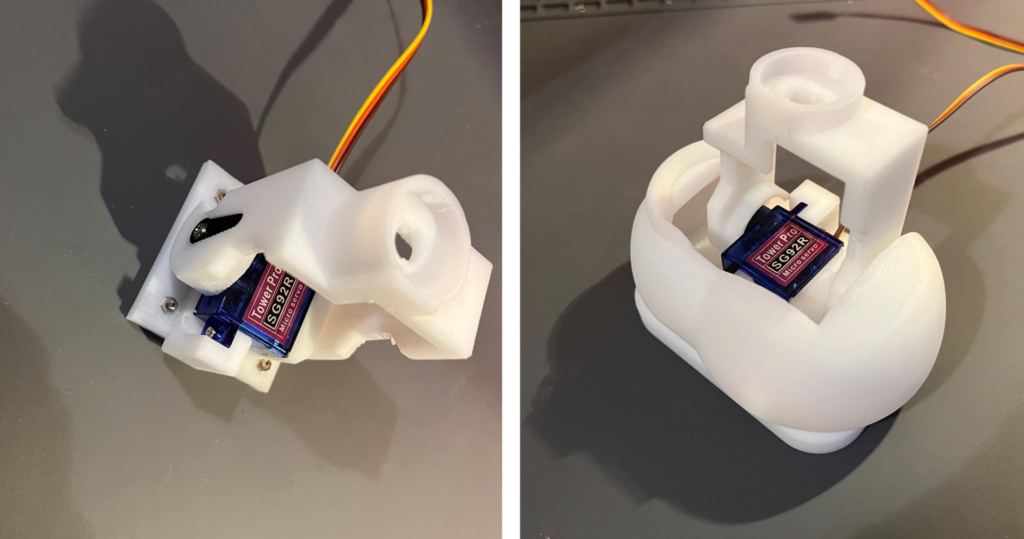
そのまま脚を組み立てていきます。この辺も随分と組立てやすくなりました。サーボモータもしっかり固定できるようにして、安定性もアップです。(図2、3)
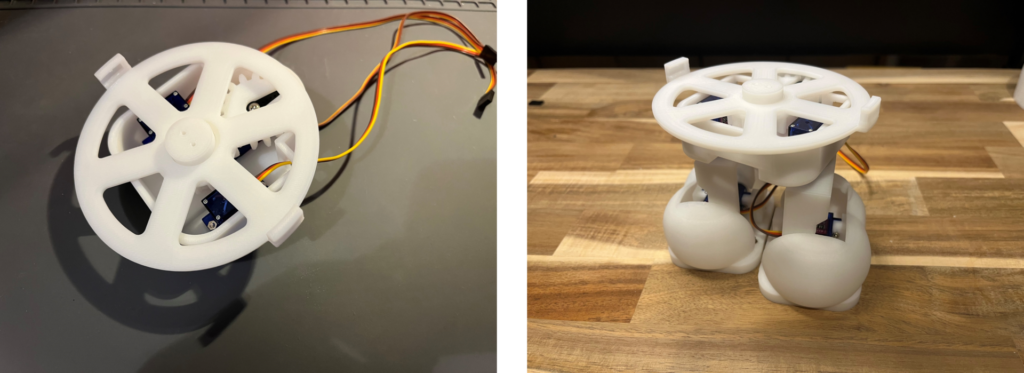
次は胴体部分です。頭の回転部分は大幅に見直し、コンパクトに、組立てやすく、安定するように設計変更しています。(図4)
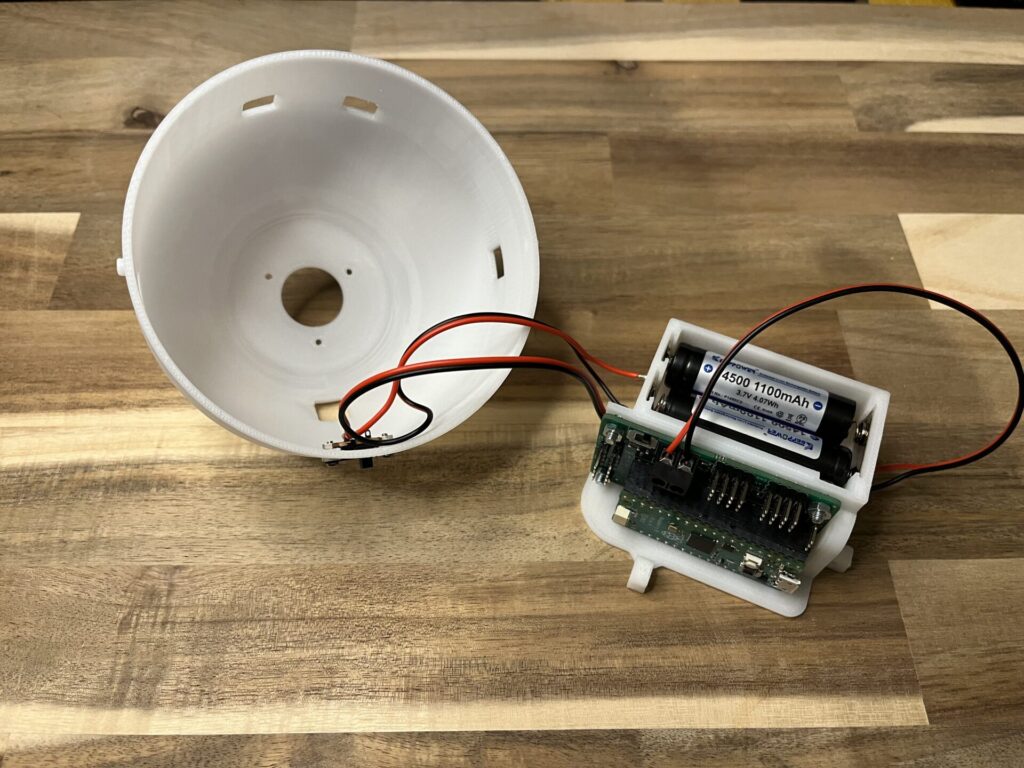
中身の回路も以前より効率的に集約しました。(図5)
以前と配置が異なるためスイッチは頭カバー側に取り付けます。
ここまで組立てたものが図6です!頭カバーのツイストロック機構も随分と使いやすくなりました。
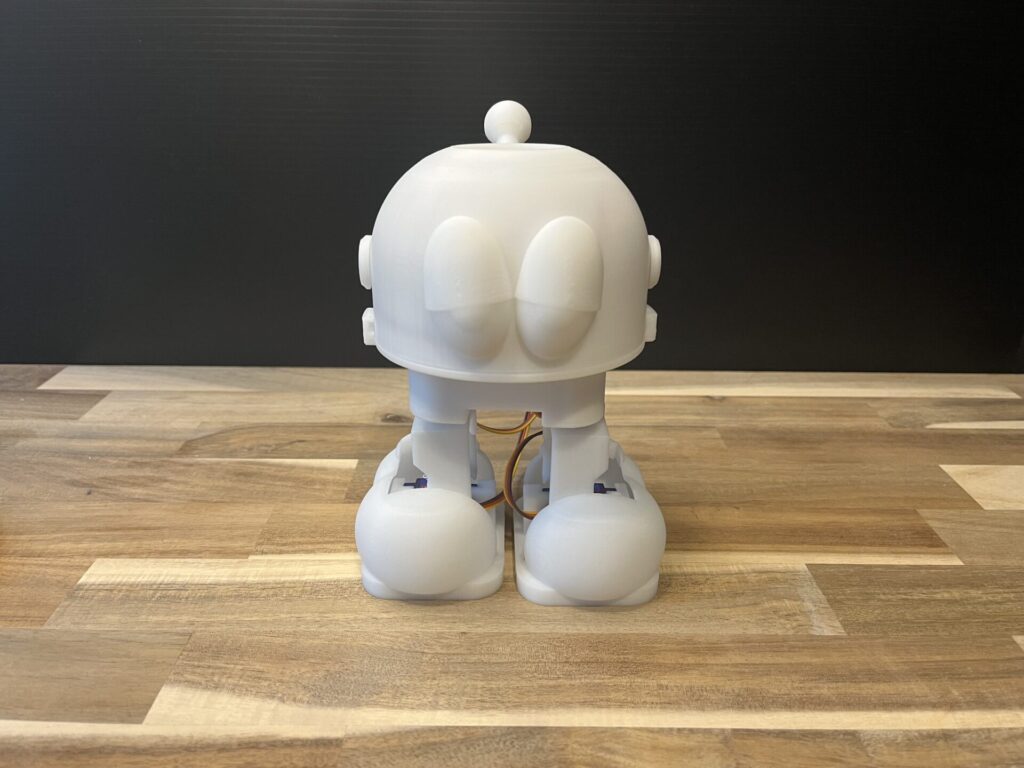
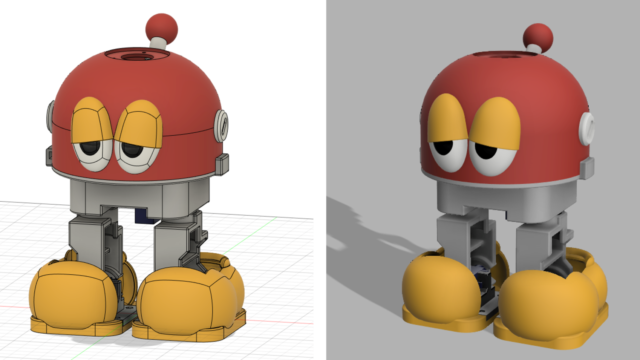
以前のものと比べると全体的にデザインはスッキリし、安定性が増しました。(図7)

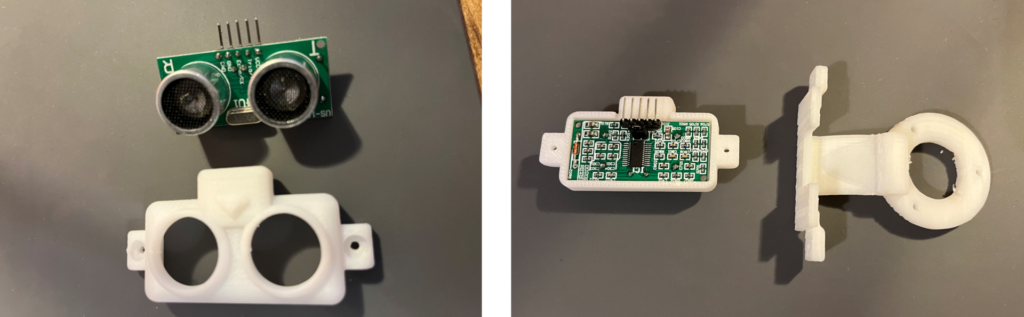
更に超音波測距センサUS-100を利用したゴーグル型センサも組立て、取り付けていきます。(図8,9)

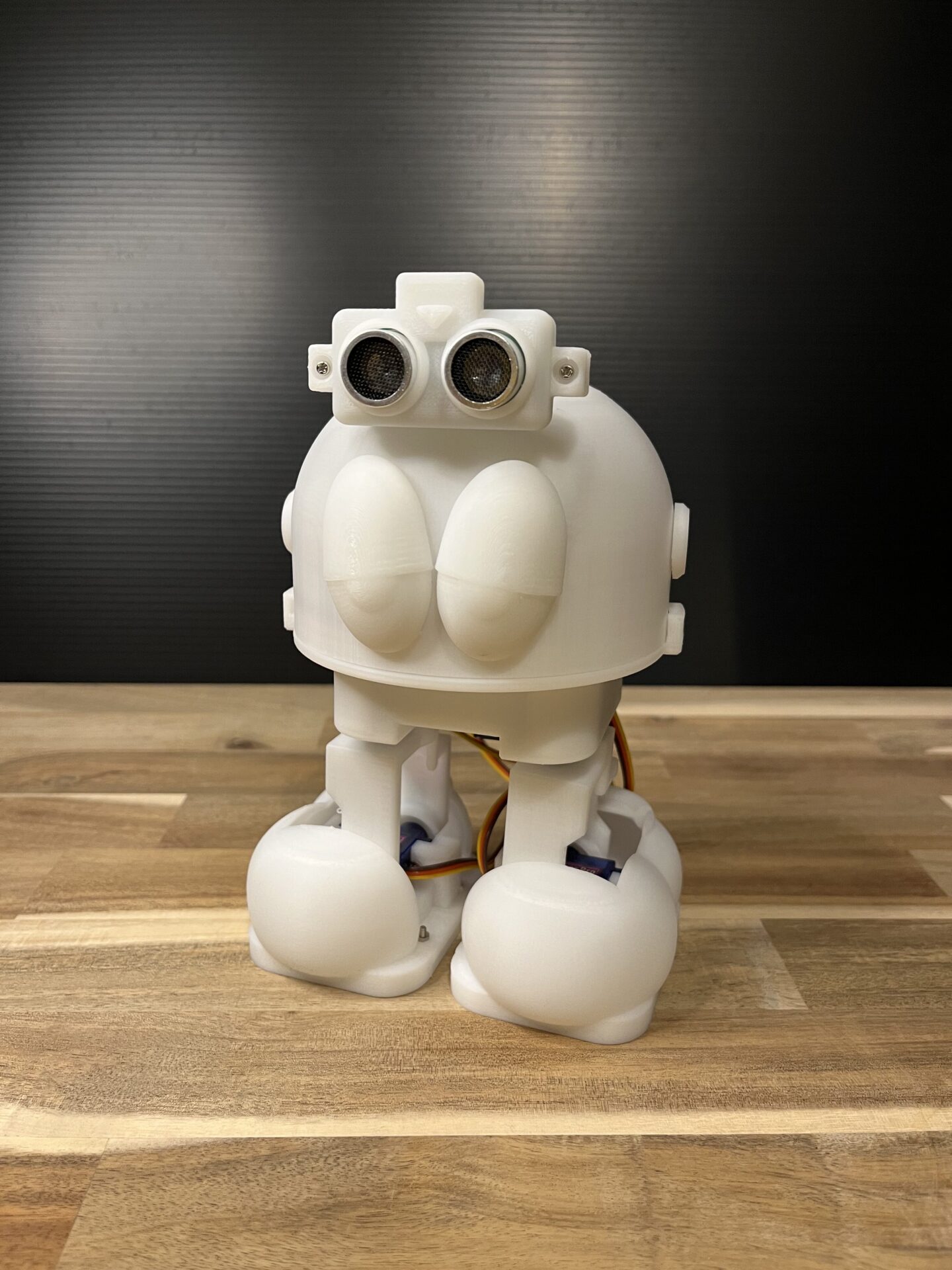
実際に動作させたものはこちらです!
さらなるバージョンアップへ
さあここまででVer.2のおおよその設計が完了し、動作を確認しました。今回の実装でまだ少し直すべき部分が見つかったので、これからそうした部分を直したバージョンを作っていきます。また、次はある程度完成形が見えてくるため、実際にカラー印刷を行っていきます。
最新情報はこちら!
最新の開発状況は以下で公開中です!ぜひご覧ください!
ABOUT ME

アニメ・マンガ・ゲーム・映画などに出てくる「かわいい&かっこいい」ロボットを作ろう!
技術系情報も発信中/
Let's make cute & cool robots from anime, games, and movies!