バージョンアップだ! 簡易的な二足歩行ロボットを作る~その7~
前回まで
前回まではロボットのサーボモータが振動してしまう「ハンチング」をある程度解消し、電源についても見直しました。
センサの搭載や動作を作り込もうと思ったが…
さて全体的にロボットのボディが完成し、これからロボットの動作を作り込んだり、センサを搭載しようと思っていたのですが、ここまで作ってロボットボディの色々な部分に直したい部分が散見されるようになりました。
なので測距センサを搭載したり、モーションの作り込みをやっていたのですが…
ボディの改善すべき点が気になり過ぎる
ということで、一旦まずはロボットのボディの改善を行うことにしました。
そしてバージョン2へ…
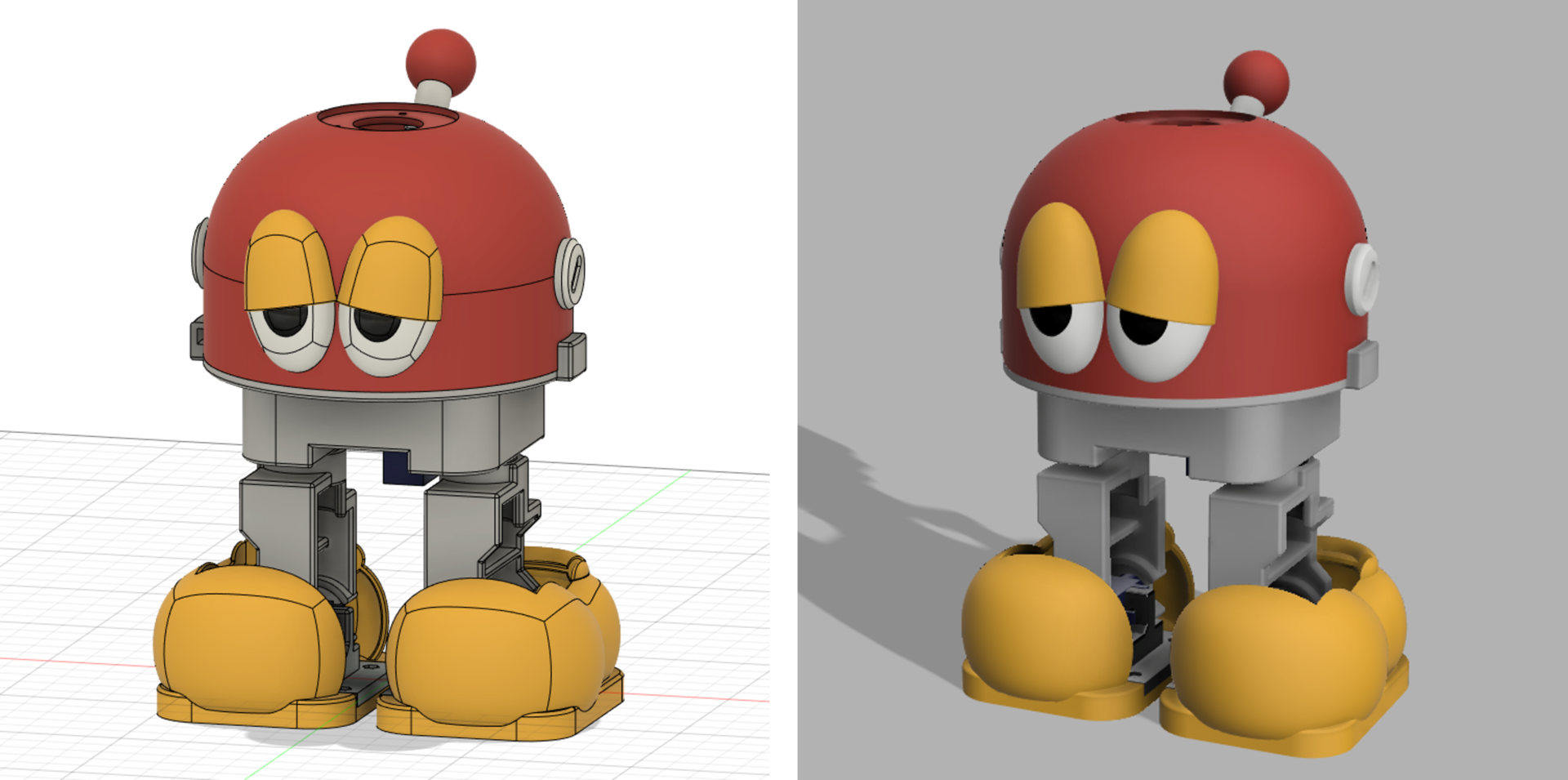
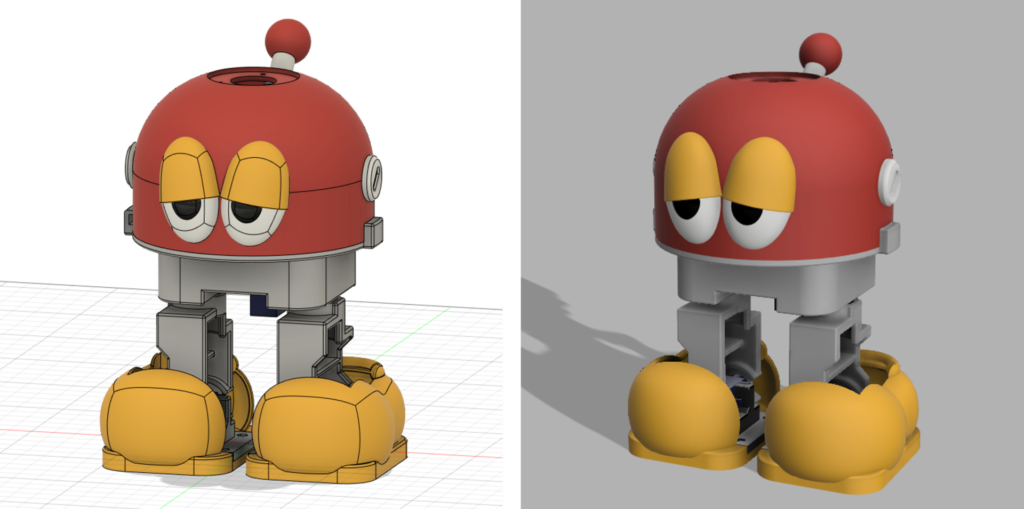
まずはこれまでのロボットをバージョン1とすると、このバージョン1はこんな感じでした。(図1)
実際には光学式測距センサを備えて図2のようになっていました。
ここまでのVer.1の問題点は以下のような点でした。
- 各動作箇所のガタツキが大きい、特に頭
- 装飾品が小さく脆い
- 内部パーツの固定が不十分
- 一部のパーツが印刷しづらく、強度的にも不十分
- 組み立てづらい
- 頭の取り外しに難あり
一つ一つ見ていきましょう。
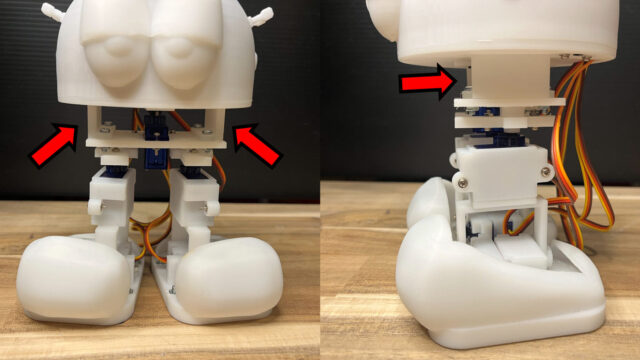
1.各動作箇所のガタツキが大きい、特に頭
まずは最大の問題点です。前回ハンチングについて検証し改善しましたが、それでも稀に発生していました。この主たる原因はサーボモータとサーボホーンが小さなサーボモータの軸のみで固定されている状態であるため、たわみやすく、振動しやすくなっていることにあるようでした。とりわけ頭は重量が重くなるため、ハンチングが起こりやすいようです。
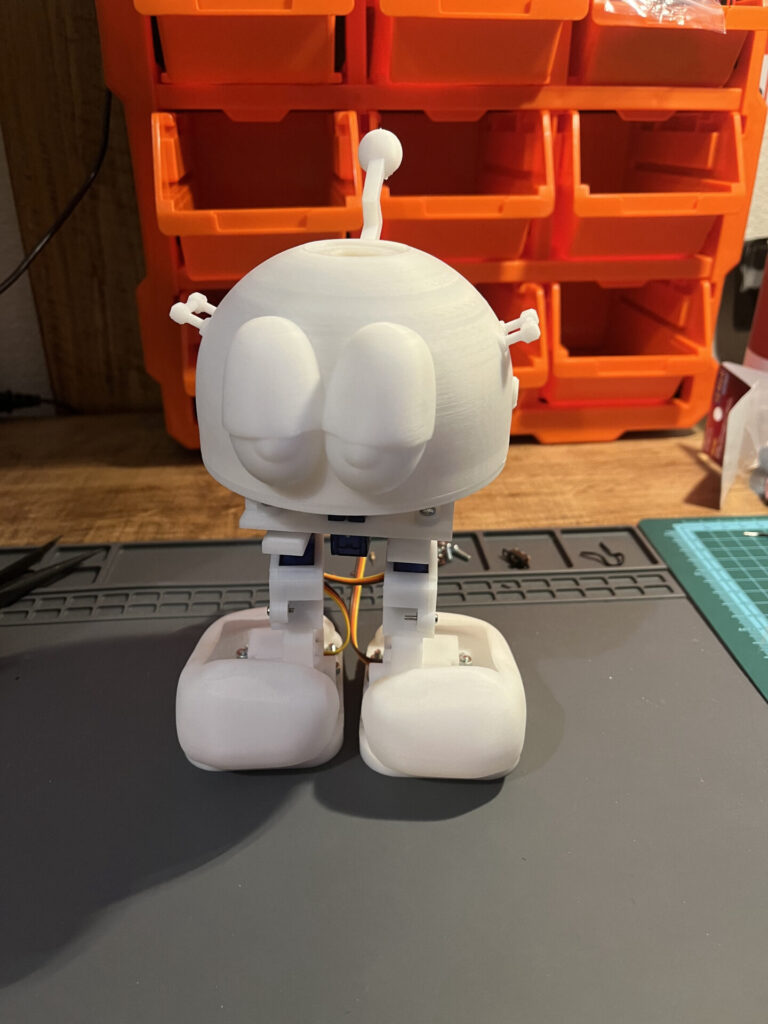
2.装飾品が小さく脆い
ロボットにいろいろな装飾品をつけていましたが、全体的に小さく、かつ脆くなってしまっていました。
3.内部パーツの固定が不十分
内部のパーツについても固定が不十分でした。
4.一部のパーツが印刷しづらく、強度的にも不十分
一部のパーツを3Dプリンタで印刷する際にサポート部分が多く作られて、そのサポート材を除去するのに非常に苦労しました。また強度が不十分なものもあり、ちょっとしたことで折れてしまう部分があったのでこれは修正しなくてはいけません。
5.組み立てづらい
4とも一部関連するのですが、組み立てに非常に苦労する部分がありました。できる限り組み立ては簡単にしたいです。
6.頭の取り外しに難あり
頭カバーは回して固定するツイストロック機構にしていましたが、若干使いづらいので改良する必要があります。
Ver.2ではこのあたりを直していきます。
Ver.2の設計
早速ですがVer.1での6つの問題点を解決したVer.2がこちらです!(図3)
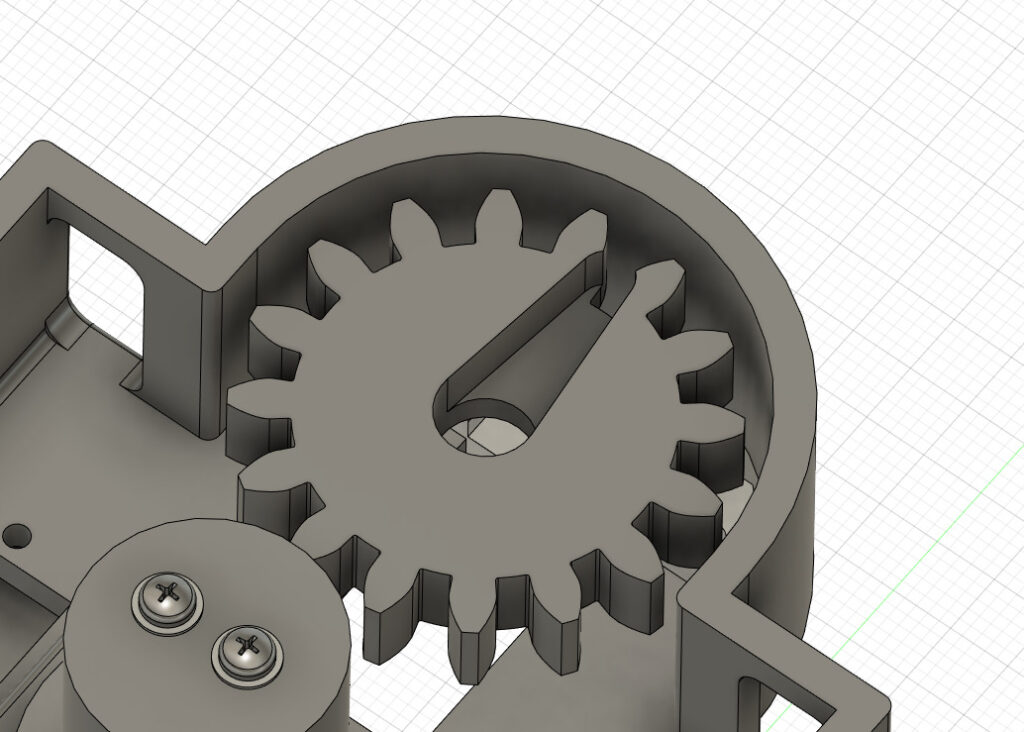
今回はギアも一部に導入し(図4)、配置を工夫しシンプルに、更にガタツキも低減させました。
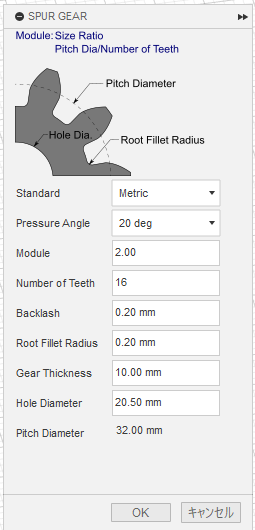
ギアの作成にはFusion360内に用意されているSpur Gearを使いました。(図5)
頭カバーのツイストロック機構も何度か試行錯誤し良い寸法を見つけました。(図6)

Ver.2の印刷
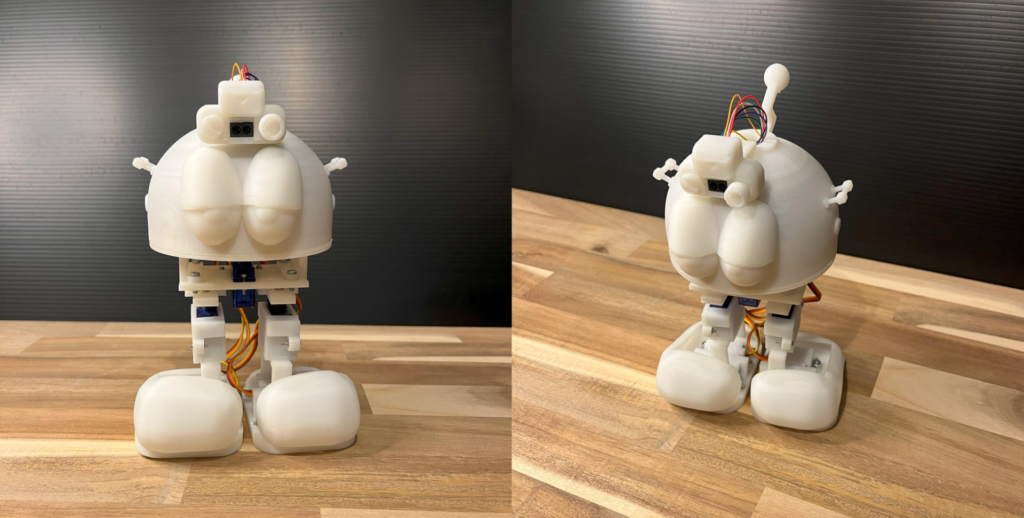
次は印刷です。
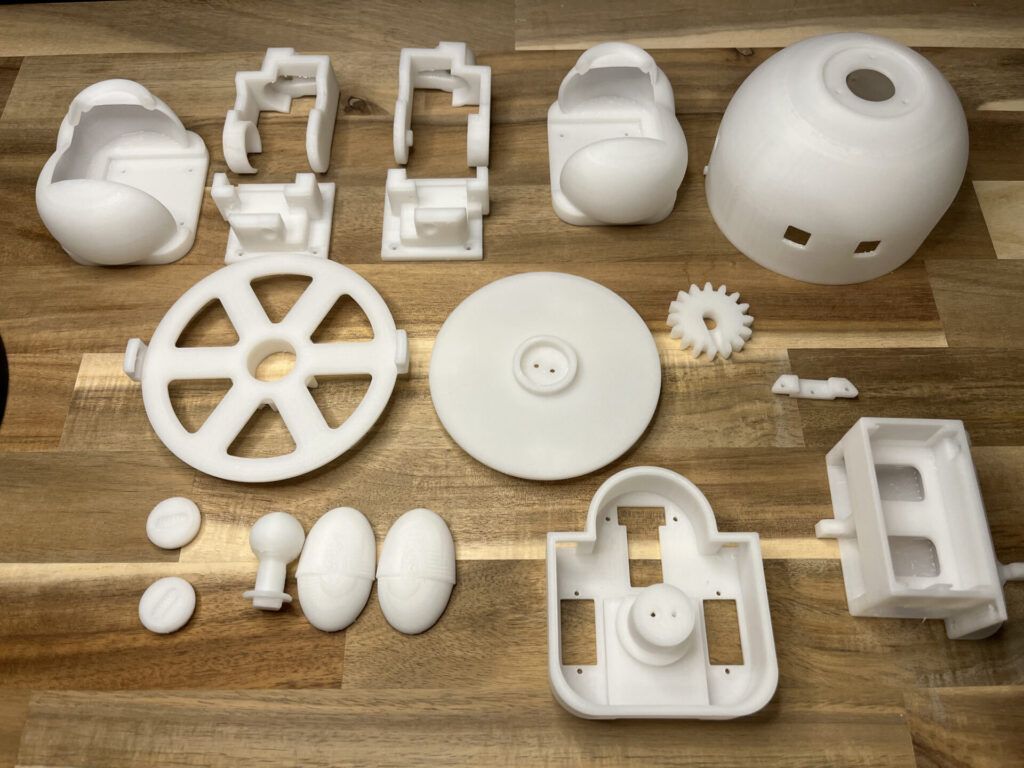
このVer.2のパーツを一通り印刷しました(図7)。3DプリンタはZortrax M200 Plus, Z-HIPSを利用しています。Ver.1に比べ、印刷もサポート剥がしも随分と楽になりました。
それでは次回はVer.2の組み立てに入ります!
次回

